쇠돌이(예전의 Pyro)외 다수
페이지 정보
작성자 로보맨 댓글 0건 조회 11,655회 작성일 09-06-29 00:37본문

:: 개인 프로필
1. 이름 김 낙 현
2. 생년월일 1979년 5월 22일(양력)
3. 현소속 고려대학교 전기공학과 대학원 재학중(석사과정)
4. 개인홈페이지 http://ee.korea.ac.kr/~vester
http://vester.wo.to/
5. 연락처 011-9666-1152
6. e-mail malbok_dad@hotmail.com
am188es@hanmail.net
:: 로봇 프로필
1th
1. 이름 개밥그릇
2. 제작년도 1998년 7~10월(4개월간)
3. 크기,중량 가로*세로*높이(대략. 실물 남아있지 않음) : 150*250*120. 중량 : 1.5kg
4. 특징 처음 만든 로봇임. 원형의 링 안에서 상대 로봇을 밀어내거나 넘어뜨리기 위한 로봇.
투로(싸움로봇) 경기를 위해 제작. 적외선 센서를 이용해 바닥을 감지하면서 돌아
다니다가 상대 로봇을 찾으면 돌진하여 밀어내는 간단한 구조.
- CPU : 80C188 (20Mhz)
- 센서 : 적외선 센서 8조
- 모터 : 12V 60RPM DC모터(제조사 불명)
2th
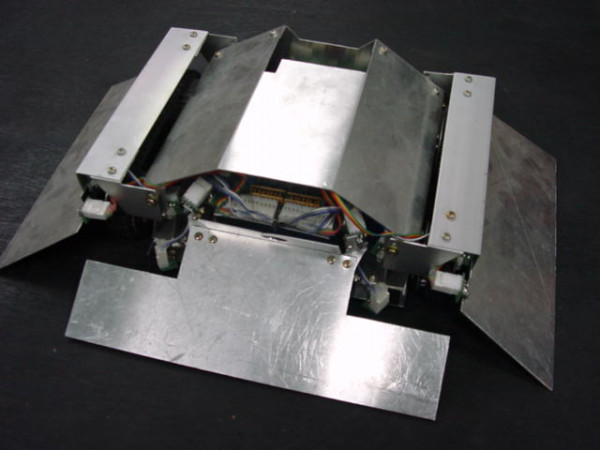
1. 이름 개밥그릇2
2. 제작년도 1999년 7월~8월 (2개월간)
3. 크기,중량 가로*세로*높이 : 300*300*140. 중량 : 2kg
4. 특징 개밥그릇1과 같은 대회를 목적으로 만들어진 로봇
- CPU : AM188ES
- 센서 : 바닥 감지용 적외선 센서 4조
상대 로봇 감지용 적외선 센서 8조
- 모터 : 12V 120RPM DC모터
- 캐터필러 사용, 알루미늄판으로 로봇 전체를 감쌌음..
3th
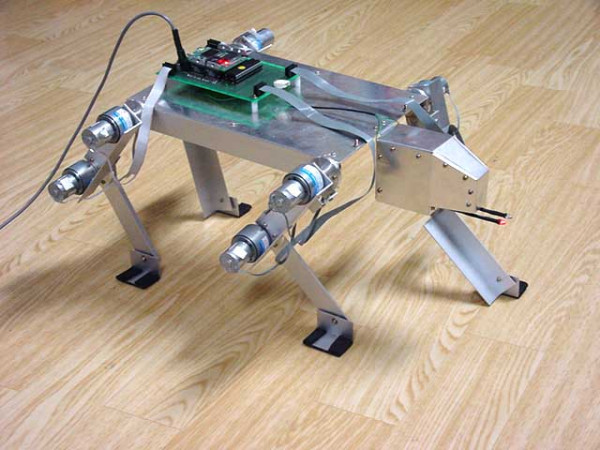
1. 이름 AT-AT(4족로봇)
2. 제작년도 2000년 1월~2000년2월(2개월간)
3. 크기,중량 가로*세로*높이(240*470*450). 중량 : 2.5kg
4. 특징 8개의 DC모터를 이용해서 4족보행을 구현한 로봇
- CPU : AM188ES
- 센서 : DC모터의 위치를 읽어들이기 위한 포텐셔미터(가변저항) 8개
- 모터 : 12V 20RPM DC모터
- 하나의 CPU를 이용해 8개의 DC모터를 위치제어, 토크제어 구현.
- 걷는속도가 느리고 불안정
4th
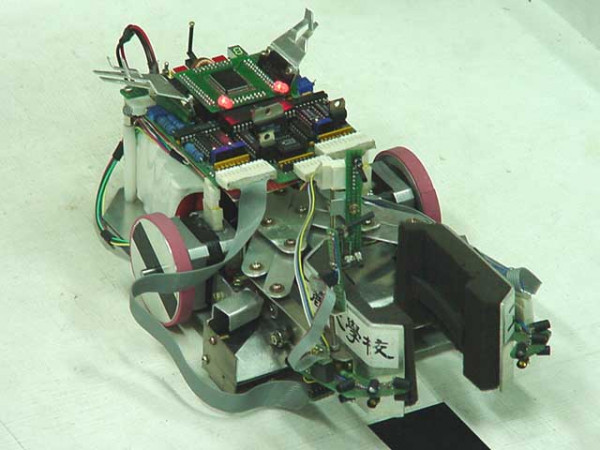
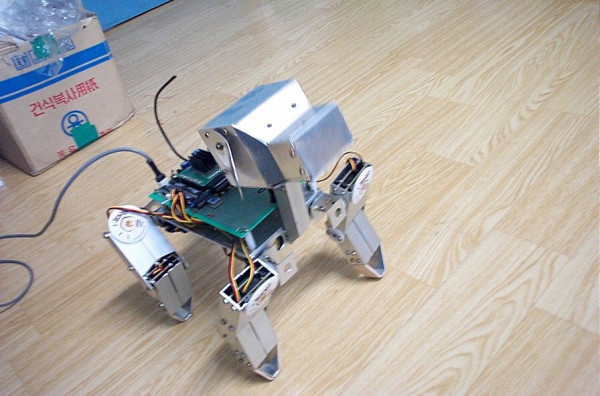
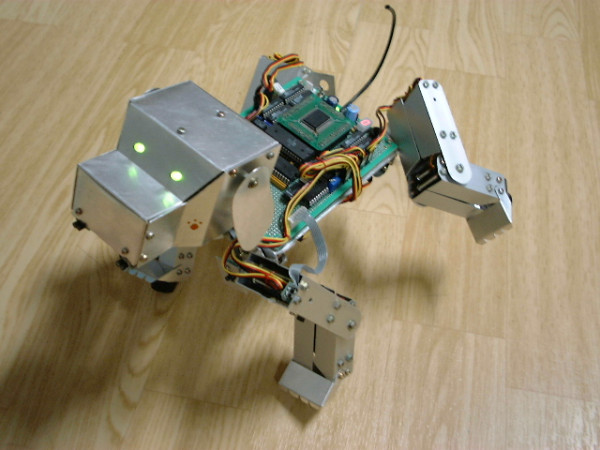
1. 이름 말복이
2. 제작년도 2000년 7월~2001년 10월(1년4개월)
3. 크기,중량 가로*세로*높이(210*220*240). 중량 : 2kg(배터리 포함)
4. 특징 4족로봇. 14개의 RC서보모터를 이용한 로봇.
14자유도의 작은 강아지 모양의 로봇으로 직진, 회전이 가능하고 여러가지 동작을 보여준다.
감정이 변하며, 감정에 따라 제각기 다른 행동을 보여주며 완전 자율적인 행동을 한다.
- CPU : AM188ES, AT89C2051 * 7개
- 센서 : 장애물 감지를 위한 적외선 센서 8조
- 사람의 터치를 감지하기 위한 터치센서 1조
- 모터 : HS-605BB
5th
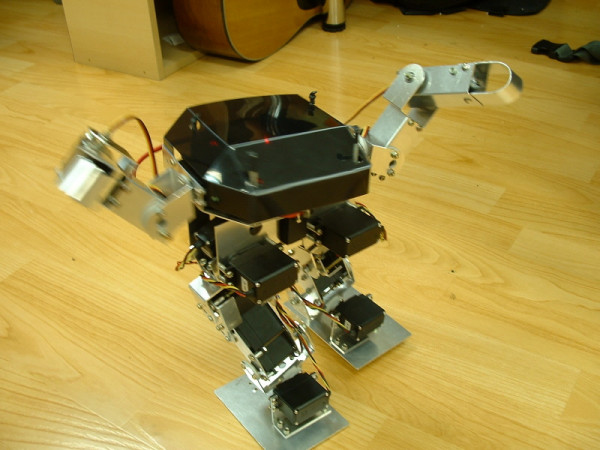
1. 이름 쇠돌이(예전의 Pyro)
2. 제작년도 2002년 12월~ 현재
3. 크기,중량 가로*세로*높이(폭*길이*키)(222*160*297). 중량 : 1.6kg
4. 특징 2족보행로봇. RC서보모터 19개를 이용해서 2족보행을 구현한 조족형 로봇.
- CPU : S3C3410X (삼성 제품 ARM7 core)
- 모터 : HS-5945MG 15개, HS-77BB 4개
- 통신 : RF(418 or 433)통신을 이용해서 조종 가능
- 역기구학을 적용하여 보폭, 발을 드는 높이를 자유자재로 조정할 수 있다.
- 조족형 로봇이며, 직진, 회전, 옆으로 걷기, 넘어졌다가 일어나기 등 다양한 동작을
구사할 수 있다.
:: Q&A
Q. 본인소개
A. 현재 고려대학교 대학원 석사과정 재학중. 보통키에, 보통 체중(?)에 보통의 외모(조금은 못난건지도..). 한마디로 딱히 내세울거 없는...
Q. 로봇소개
A. 학부 4년반, 대학원 1년동안 로봇만 만들면서 살았군요. 아까운 내 청춘...ㅠ.ㅠ 로봇이 몇대 있지만 비슷한 로봇은 거의 없군요. 로봇들의 전체적인 특징이라면 기구부의 깔끔함에 상당히 신경을 쓴다는 정도. 단순히 바퀴만 굴러가는 로봇보다는 형태가 변화하는(팔이나 다리)로봇을 선호.
Q. 내 인생에 있어서 로봇은 어떤의미?
A. 대학생활 전부를 갖다바친 청춘의 적!!
Q. 가장 좋아하는 로봇은?(실존로봇중)
A. 역시 내가 만든 로봇들.. 그 외에 디디와 티티
Q. 만화, 소설, 애니메이션에 나오는 로봇중 가장 좋아하는 로봇은?
A. 영화를 본적은 없지만 '바이센테니얼 맨'
Q. 로봇 매니아로써 좋아하는(또는 존경하는) 사람은?
A. 김병수 선배님. 같은 동아리 선배님으로서 로봇을 좋아하는 사람이라면 설명이 필요없는 분.
Q. 로봇제작시 에피소드소개
A. 1) 다른 칩 아래에 232칩을 꽂을 소켓만 납땜하고 칩을 꽂지 않은채로 시리얼 통신이 안돼서 한달을 허비한 일.. 2) 솔직히 '잘난' 대학생들은 로봇을 신기해하지 않는다. 별거 아니라는 생각에.. 하지만 로봇을 가장 신기해하는 사람들은 자장면 배달부와 가스배달부. 전시회때 말복이를 보면서 한시간 가까이 배달통과 가스통을 든채로 보고 있었다. '뭐, 별로네..' 를 말하는 학생들보다 훨씬 솔직했음.
Q. 로봇 매니아로써 가장 기억에 남는 일은?
A. 아모로 황신혜를 제작할때 밤새 창문하나 없는 동아리 쪽방에서 팔 부분을 제작하고
나오니 벌써 해가 뜨고 있었다. 그때 동아리방에서 세수하고 내려다본 아침의 학교 풍경이 아직도 기억에 생생하게 남는다.
Q. 이런 로봇을 만들고 싶다.
A. 아무데나 놔둬도 혼자 잘 가는 로봇
Q. 이런 로봇이 나왔으면 좋겠다.
A. 감정과 순수한 마음을 가진 로봇
Q. 앞으로의 계획은?
A. 많이 부족하지만, 내가 알고있는것들을 남에게 가르쳐 줄 수 있는곳에 있고싶다.
:: Gallery
개밥그릇II
AT-AT
황신혜
말복이
말복이
쇠돌이
[이 게시물은 로보맨님에 의해 2013-09-14 23:23:48 묻고답하기에서 이동 됨]1. 이름 김 낙 현
2. 생년월일 1979년 5월 22일(양력)
3. 현소속 고려대학교 전기공학과 대학원 재학중(석사과정)
4. 개인홈페이지 http://ee.korea.ac.kr/~vester
http://vester.wo.to/
5. 연락처 011-9666-1152
6. e-mail malbok_dad@hotmail.com
am188es@hanmail.net
:: 로봇 프로필
1th
1. 이름 개밥그릇
2. 제작년도 1998년 7~10월(4개월간)
3. 크기,중량 가로*세로*높이(대략. 실물 남아있지 않음) : 150*250*120. 중량 : 1.5kg
4. 특징 처음 만든 로봇임. 원형의 링 안에서 상대 로봇을 밀어내거나 넘어뜨리기 위한 로봇.
투로(싸움로봇) 경기를 위해 제작. 적외선 센서를 이용해 바닥을 감지하면서 돌아
다니다가 상대 로봇을 찾으면 돌진하여 밀어내는 간단한 구조.
- CPU : 80C188 (20Mhz)
- 센서 : 적외선 센서 8조
- 모터 : 12V 60RPM DC모터(제조사 불명)
2th
1. 이름 개밥그릇2
2. 제작년도 1999년 7월~8월 (2개월간)
3. 크기,중량 가로*세로*높이 : 300*300*140. 중량 : 2kg
4. 특징 개밥그릇1과 같은 대회를 목적으로 만들어진 로봇
- CPU : AM188ES
- 센서 : 바닥 감지용 적외선 센서 4조
상대 로봇 감지용 적외선 센서 8조
- 모터 : 12V 120RPM DC모터
- 캐터필러 사용, 알루미늄판으로 로봇 전체를 감쌌음..
3th
1. 이름 AT-AT(4족로봇)
2. 제작년도 2000년 1월~2000년2월(2개월간)
3. 크기,중량 가로*세로*높이(240*470*450). 중량 : 2.5kg
4. 특징 8개의 DC모터를 이용해서 4족보행을 구현한 로봇
- CPU : AM188ES
- 센서 : DC모터의 위치를 읽어들이기 위한 포텐셔미터(가변저항) 8개
- 모터 : 12V 20RPM DC모터
- 하나의 CPU를 이용해 8개의 DC모터를 위치제어, 토크제어 구현.
- 걷는속도가 느리고 불안정
4th
1. 이름 말복이
2. 제작년도 2000년 7월~2001년 10월(1년4개월)
3. 크기,중량 가로*세로*높이(210*220*240). 중량 : 2kg(배터리 포함)
4. 특징 4족로봇. 14개의 RC서보모터를 이용한 로봇.
14자유도의 작은 강아지 모양의 로봇으로 직진, 회전이 가능하고 여러가지 동작을 보여준다.
감정이 변하며, 감정에 따라 제각기 다른 행동을 보여주며 완전 자율적인 행동을 한다.
- CPU : AM188ES, AT89C2051 * 7개
- 센서 : 장애물 감지를 위한 적외선 센서 8조
- 사람의 터치를 감지하기 위한 터치센서 1조
- 모터 : HS-605BB
5th
1. 이름 쇠돌이(예전의 Pyro)
2. 제작년도 2002년 12월~ 현재
3. 크기,중량 가로*세로*높이(폭*길이*키)(222*160*297). 중량 : 1.6kg
4. 특징 2족보행로봇. RC서보모터 19개를 이용해서 2족보행을 구현한 조족형 로봇.
- CPU : S3C3410X (삼성 제품 ARM7 core)
- 모터 : HS-5945MG 15개, HS-77BB 4개
- 통신 : RF(418 or 433)통신을 이용해서 조종 가능
- 역기구학을 적용하여 보폭, 발을 드는 높이를 자유자재로 조정할 수 있다.
- 조족형 로봇이며, 직진, 회전, 옆으로 걷기, 넘어졌다가 일어나기 등 다양한 동작을
구사할 수 있다.
:: Q&A
Q. 본인소개
A. 현재 고려대학교 대학원 석사과정 재학중. 보통키에, 보통 체중(?)에 보통의 외모(조금은 못난건지도..). 한마디로 딱히 내세울거 없는...
Q. 로봇소개
A. 학부 4년반, 대학원 1년동안 로봇만 만들면서 살았군요. 아까운 내 청춘...ㅠ.ㅠ 로봇이 몇대 있지만 비슷한 로봇은 거의 없군요. 로봇들의 전체적인 특징이라면 기구부의 깔끔함에 상당히 신경을 쓴다는 정도. 단순히 바퀴만 굴러가는 로봇보다는 형태가 변화하는(팔이나 다리)로봇을 선호.
Q. 내 인생에 있어서 로봇은 어떤의미?
A. 대학생활 전부를 갖다바친 청춘의 적!!
Q. 가장 좋아하는 로봇은?(실존로봇중)
A. 역시 내가 만든 로봇들.. 그 외에 디디와 티티
Q. 만화, 소설, 애니메이션에 나오는 로봇중 가장 좋아하는 로봇은?
A. 영화를 본적은 없지만 '바이센테니얼 맨'
Q. 로봇 매니아로써 좋아하는(또는 존경하는) 사람은?
A. 김병수 선배님. 같은 동아리 선배님으로서 로봇을 좋아하는 사람이라면 설명이 필요없는 분.
Q. 로봇제작시 에피소드소개
A. 1) 다른 칩 아래에 232칩을 꽂을 소켓만 납땜하고 칩을 꽂지 않은채로 시리얼 통신이 안돼서 한달을 허비한 일.. 2) 솔직히 '잘난' 대학생들은 로봇을 신기해하지 않는다. 별거 아니라는 생각에.. 하지만 로봇을 가장 신기해하는 사람들은 자장면 배달부와 가스배달부. 전시회때 말복이를 보면서 한시간 가까이 배달통과 가스통을 든채로 보고 있었다. '뭐, 별로네..' 를 말하는 학생들보다 훨씬 솔직했음.
Q. 로봇 매니아로써 가장 기억에 남는 일은?
A. 아모로 황신혜를 제작할때 밤새 창문하나 없는 동아리 쪽방에서 팔 부분을 제작하고
나오니 벌써 해가 뜨고 있었다. 그때 동아리방에서 세수하고 내려다본 아침의 학교 풍경이 아직도 기억에 생생하게 남는다.
Q. 이런 로봇을 만들고 싶다.
A. 아무데나 놔둬도 혼자 잘 가는 로봇
Q. 이런 로봇이 나왔으면 좋겠다.
A. 감정과 순수한 마음을 가진 로봇
Q. 앞으로의 계획은?
A. 많이 부족하지만, 내가 알고있는것들을 남에게 가르쳐 줄 수 있는곳에 있고싶다.
:: Gallery
개밥그릇II
AT-AT
황신혜
말복이
말복이
쇠돌이
댓글목록
등록된 댓글이 없습니다.