2족보행로봇 제작기 - (1) 조립danb
페이지 정보
작성자 로보맨 댓글 0건 조회 13,123회 작성일 09-06-28 06:23본문

제작의도
아시모가 2족보행로봇의 세계를 펼친이후로 많은 로봇들이 만들어지고 있습니다. 특히, RC에 사용되어 오던 서보모터를 사용한 로봇의 제작에 매니아들 사이에서 인기를 끌고 있습니다.
국내에서 SDR급의 2족보행 로봇이 출전하는 대회는 한국로보원대회와 로보도기 대회가 있습니다. 첫번째 로봇제작기는 이 대회에 출전 가능한 2족보행로봇을 제작하는 것으로 로보맨 제작기의 테잎을 끊겠습니다... ^^y
우선, 본편에서는 조립식 모터와 기성품 프레임의 조립을 통해 로봇의 외형을 만들어 보겠습니다. 이번 제작기에 사용되는 로봇은 (주)메가로보틱스에서 판매되는 휴머노이드로봇셋트입니다. 액츄에이터인 서보모터를 비롯한 MPU보드, 어답터, 케이블, 볼트 등 모든 부품이 하나의 셋트로 구성되어 있으므로, 휴머노이드 로봇을 제작하시려고 하시는 초보자들이 쉽게 접근할 수 있습니다. 패키지에 대한 소개는 로보맨의 샵/로봇관련상품리뷰에 자세히 소개될 예정입니다. 자, 지금부터 시작해보겠습니다.
사 양
컨 셉 : 대회 출전 가능한 2족보행로봇제작
엑튜에이터 : 조립형 엑튜에이터인 AI모터를 이용
특 징 : 조립식 서보모터를 이용하므로써 초보자들이 프레임등을 제작하는 번거로움을 피할 수 있습니다. 걷기도 전에 프레임설계와 제작에 힘이 빠져버린다면, 절반이상은 포기하시겠지요?
개별부품설명
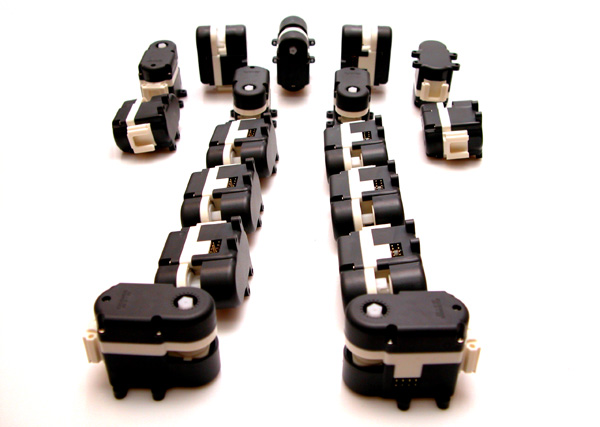
(1) 액츄에이터
기 어 비 : 160:1
최고속도 : 90rpm
최대토크 : 6kgf/cm
제어신호 : TTL레벨의 RS-232(2400~460800bps)
입력전압 : DC +5V~10V
무 게 : 40g
크 기 : 51.5 X 24.75 X 37.35mm
주요특징 : 2개의 출력샤프트
다양한 연결 조인트(11종)
위치와 토크센싱기능(센서 불필요)
넓은 위치제어각도(332.03')
다양한 동작 모드(5가지)
속도조절 기능
자기보호기능(과전류 방지, 역전압 보호)
수 량 : 17개
가 격 : 구입처 문의요망
구 입 처 : (주)메가로보틱스 www.megarobotics.com

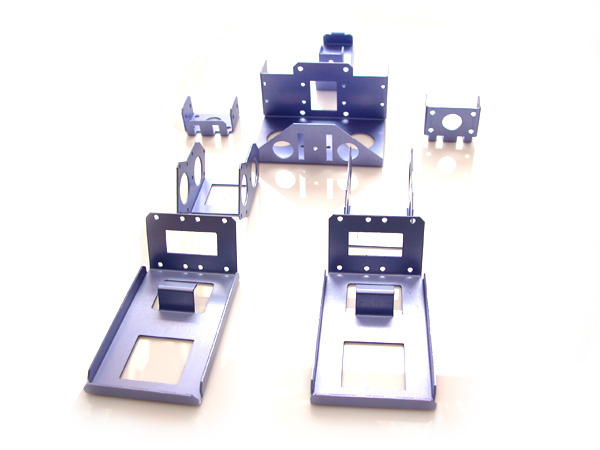
(2) 기본프레임
특 징 : AI모터전용 휴머노이드 타입 프레임
수 량 : 머리(2개1조), 가슴(2개1조), 허벅지(2), 발(2). 총8ea
색 : 골드, 실버, 블루
가 격 : 구입처 문의요망
구 입 처 : (주)메가로보틱스 www.megarobotics.com
특 징 : AI모터전용 휴머노이드 타입 프레임
수 량 : 머리(2개1조), 가슴(2개1조), 허벅지(2), 발(2). 총8ea
색 : 골드, 실버, 블루
가 격 : 구입처 문의요망
구 입 처 : (주)메가로보틱스 www.megarobotics.com
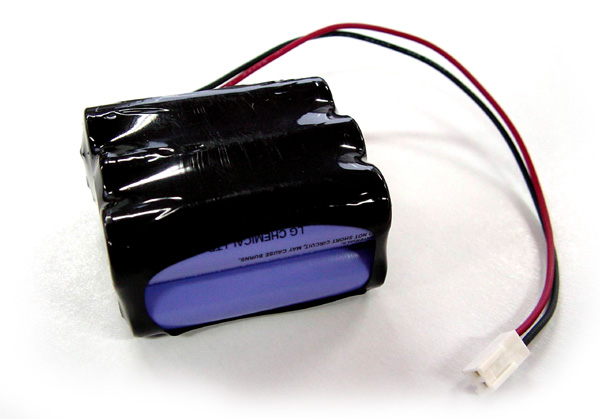
(3) 배터리
출력전압 : DC 7.2V 1900mA (AA Size 6EA 배터리팩)
수 량 : 3개 2열
가 격 : 약 2~3만원선
구 입 처 : 용산전자상가, 청계천 등 배터리전문점
(휴머노이드 셋트에 포함되어 있슴)
조립
AI모터를 사용하면 프레임 없이도 제작이 가능합니다. 그러나 좀더 안정된 형태의 로봇을 얻으로면 최소의 프레임을 요합니다.(격투대회나가서 무사하려면..) 킷트에 포함되어 있는 양산형 프레임을 사용하여 로봇을 완성시켜보기로 하겠습니다.
기본 제공되는 프레임은 머리(2), 가슴(2), 허벅지(2), 발(2)로 총 8개입니다. 기본프레임 만으로도 훨씬 멋있고 견고한 로봇을 만들 수가 있습니다.
조립시작
조립의 순서는 특별히 공식화하는 것보다는 스스로 해보는 것이 좋습니다. 실제로 본 로봇의 제작기를 위해 조립을 하였을때도, 특정 메뉴얼이 없는상태에서, 정면, 후면의 완성 이미지만을 참조하여 조립을 했습니다. 그만큼 조금만 집중하면 조립이 가능합니다.
전체적인 순서는 양팔과 양다리를 먼저 만들고, 양팔은 머리프레임에 고정후 가슴프레임에, 그리고 완성된 양발을 가슴프레임에 고정하는 순서로 하면됩니다. 가슴프레임에 다리를 고정하기전에 반드시 배터리를 먼저 수납해주어야만 합니다.
가슴프레임 안쪽 배터리 수납공간은 배터리의 수납이 어려울 정도로 크기의 여유가 없으니 연결부위의 볼트부분에 의해 수납이 어려울 수도 있습니다. 이부분은 나중에 경기시 배터리의 잦은 탈부착에 방해가 되므로 최종적으로는 개선 내지는 개조되어야 할 것입니다.
관절의 이음
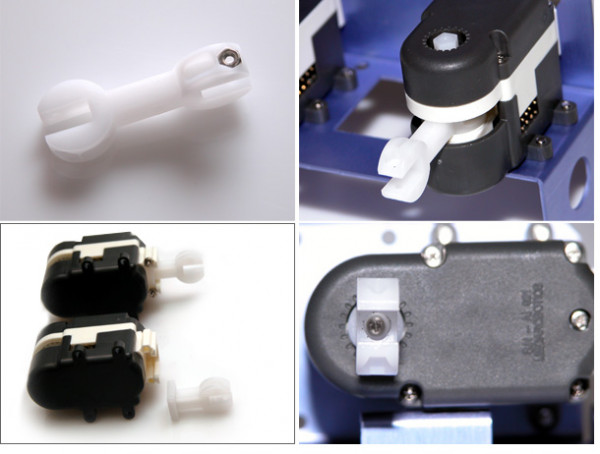
관절끼리 연결을 위해서는 패키지에 제공되는 조인트를 사용하게 됩니다. 조립에 사용되는 11개의 조인트중 본 로봇의 제작에 사용되는 조인트는 세가지 종류입니다.

완성
서보모터와 기성품 프레임의 조립만으로 로봇의 하드웨어를 완성시키는데 천천히 작업해서 4시간정도가 소요되었습니다. 혹자는 완성품을 사용해 조립하면 로봇을 제작하는 의미가 없다고 하실지도 모르지만, 초보자들의 입장에서, 까다로운 기구학적인 문제를 수월하게 해결하고 로봇제작의 끝까지 가보는 것이 더큰 의미가 있으리라 생각됩니다.
다음 편에서는 확장보드를 활용한 배선과 완성된 로봇을 움직이게 할 수 있는 보드들을 직접 구성해 보도록 하겠습니다.
Special Thanks
제작기를 위해 휴머노이드 셋트를 지원해 주신 (주)메가로보틱스사에 감사 드립니다.
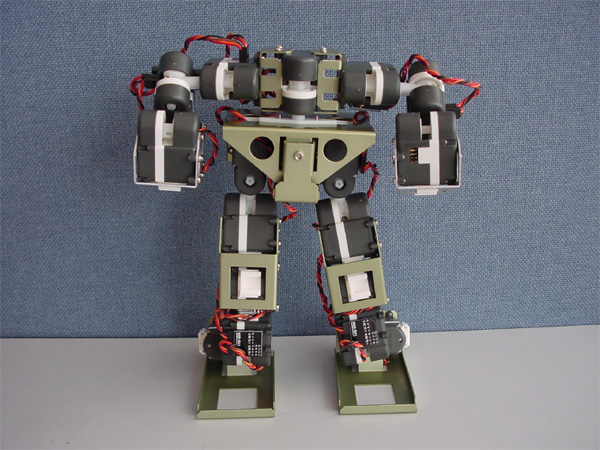
참조이미지 - 휴머노이드 로봇 완성품
댓글목록
등록된 댓글이 없습니다.