JR RB2000 제작기-4. 몸체 조립
페이지 정보
작성자 라퓨타 로봇왕국 댓글 0건 조회 24,308회 작성일 09-10-01 11:19본문

|
JR RB2000 제작기 |
|
라퓨타 로봇왕국 |
|
4. 몸체 조립 |

| |
|


| |
|


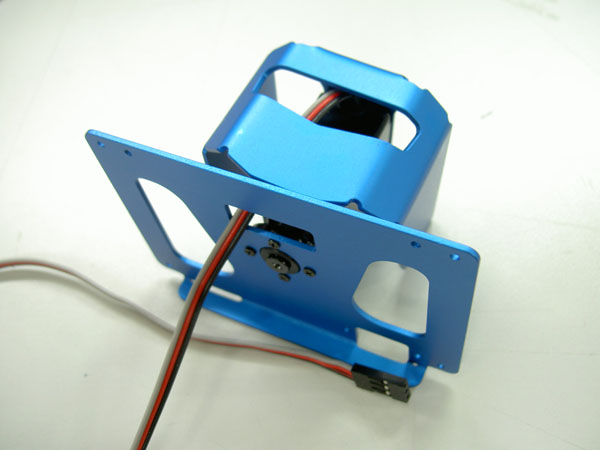
머리 조립
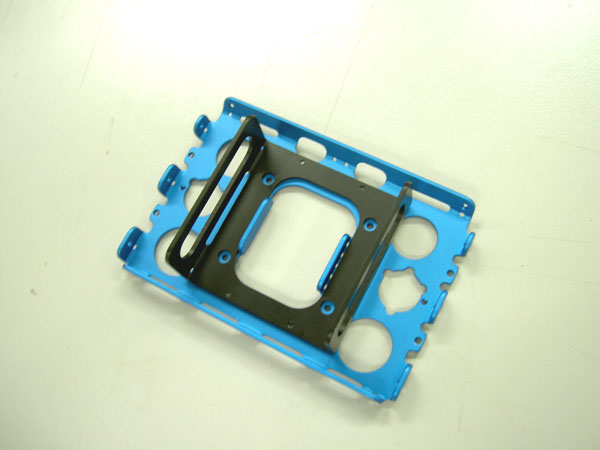
몸체 하단부와 배터리 격납부를 조립한다.
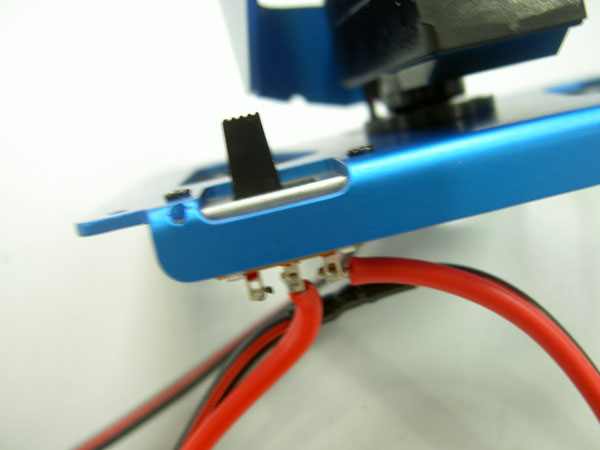
스위치 조립
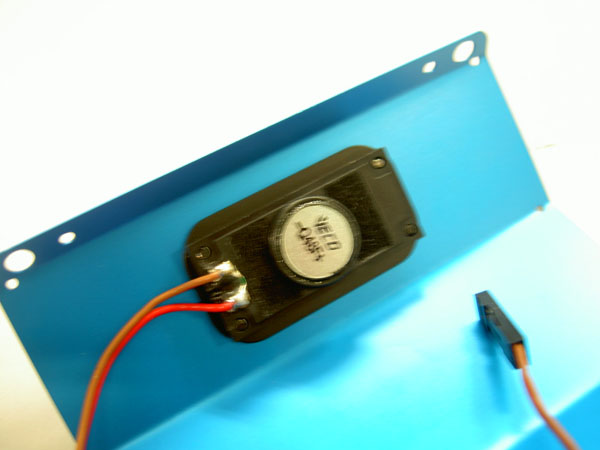
스피커 조립

조립 완료된 각 부위 합체하기 - 드디어 합체다.
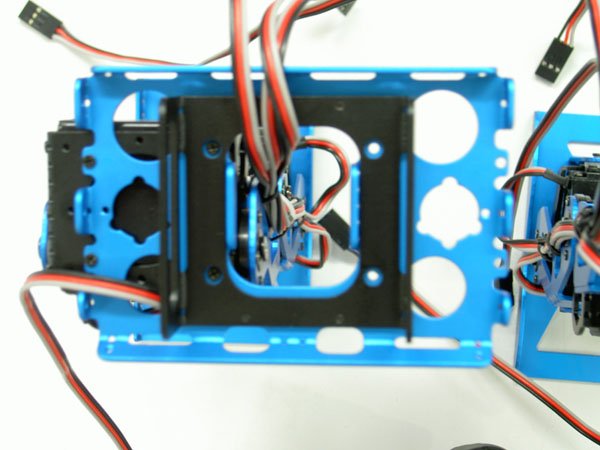
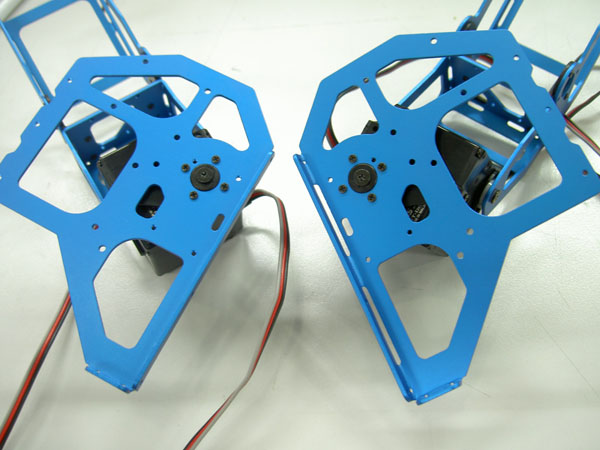
다리를 몸체 하단 부품에 조립한다.
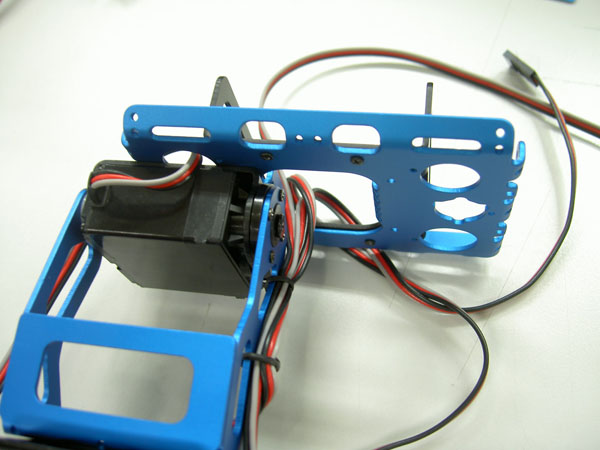
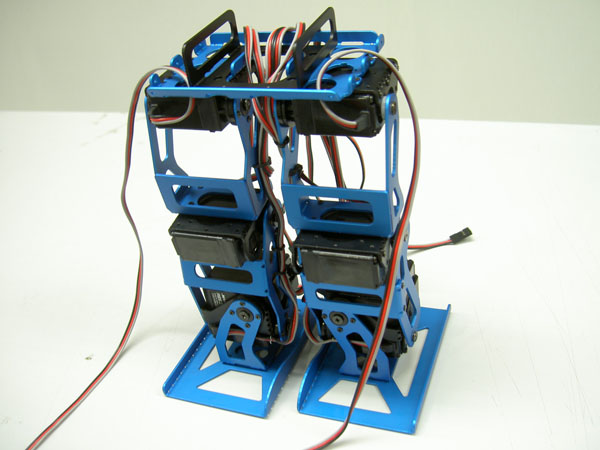
| 다리 합체 완료 - 배선은 그림과 같이 둔다. |
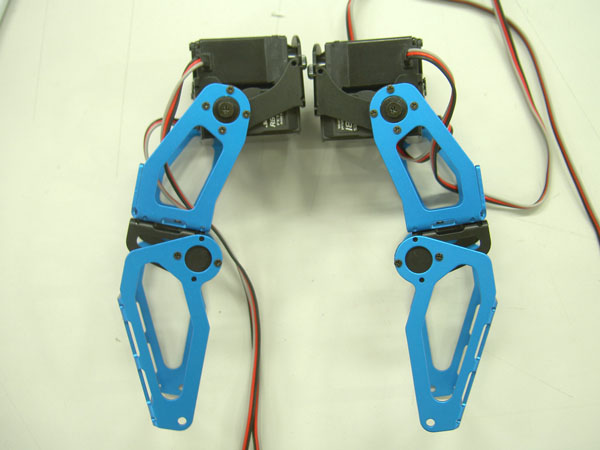
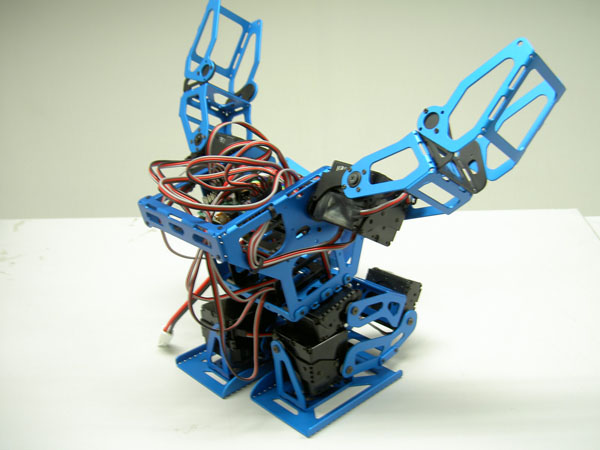
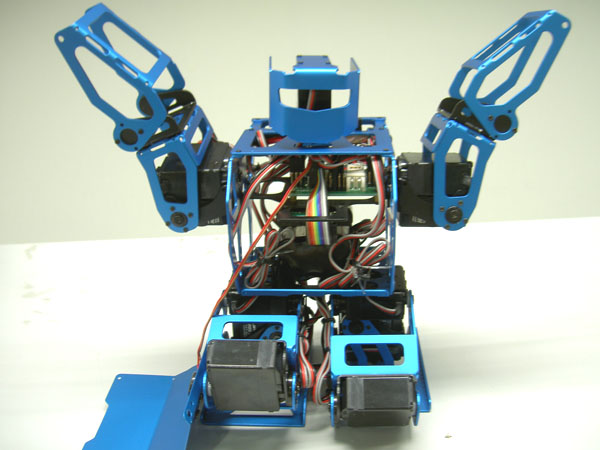
| 팔을 합체한다. |
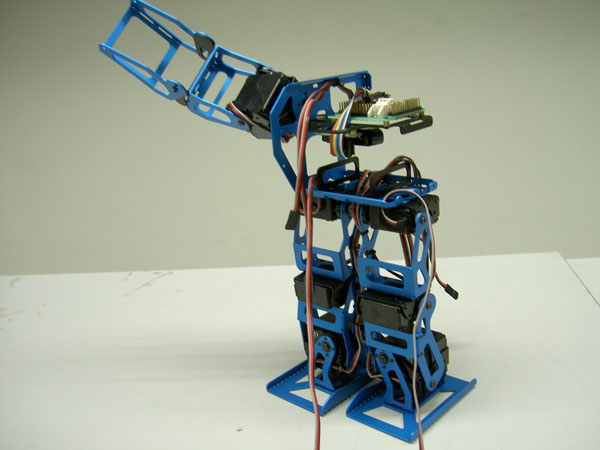
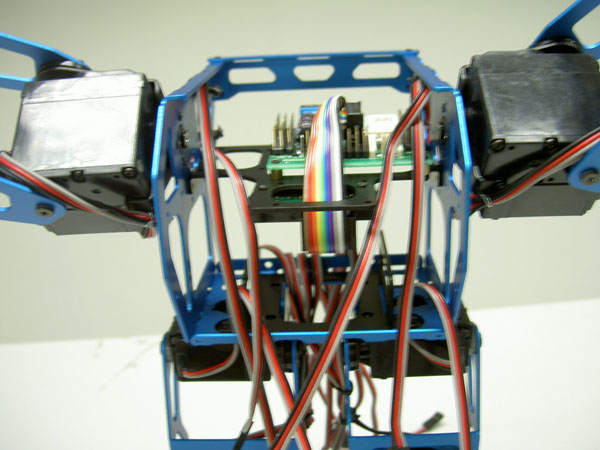
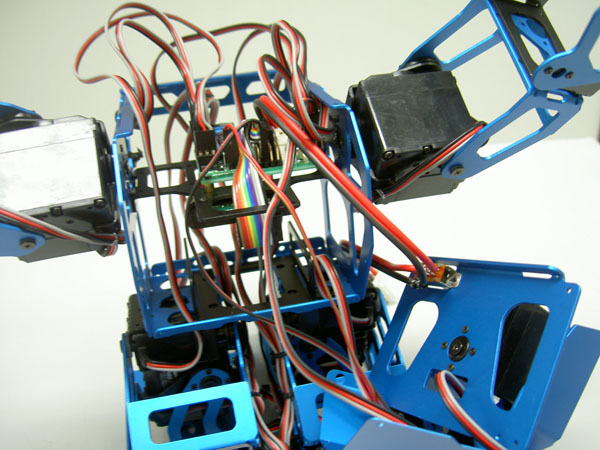
한 쪽 팔을 붙이고 보드를 조립한다.
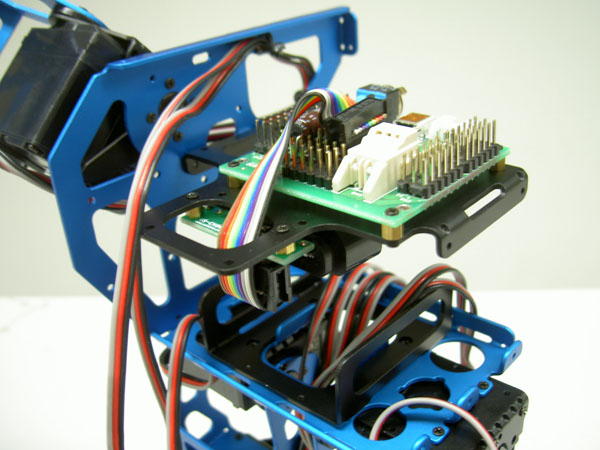
보드 조립한 모습
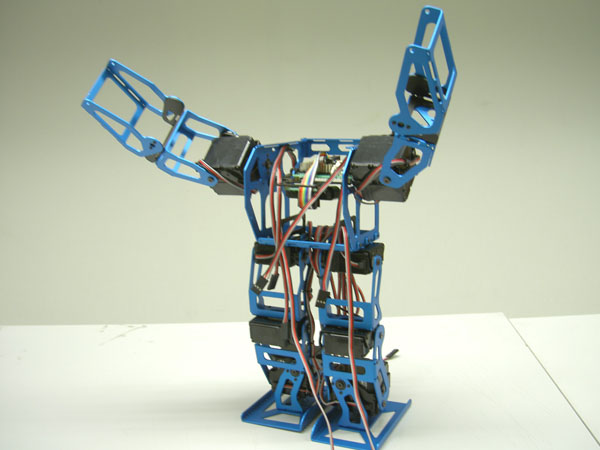
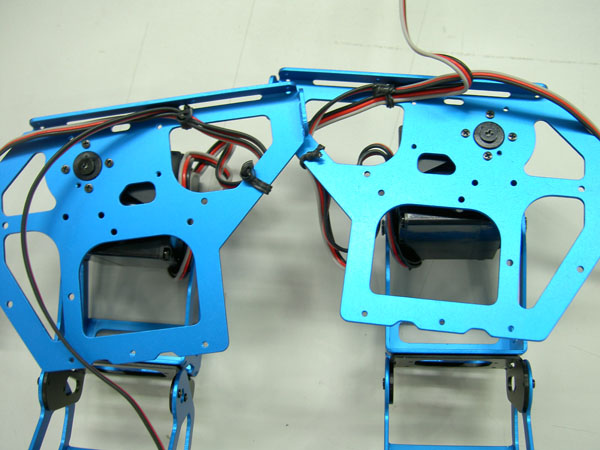
나머지 팔을 조립한다.
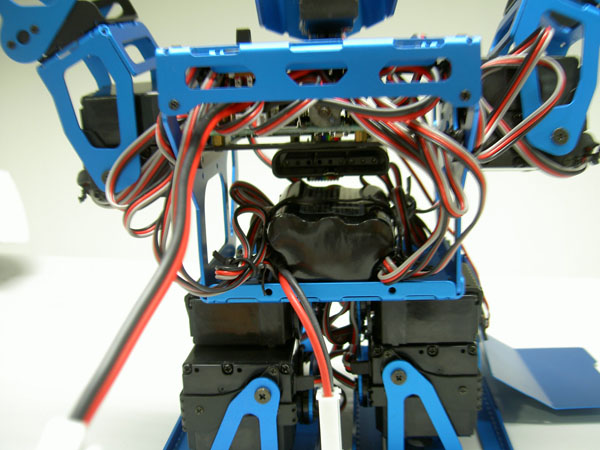
배선을 정리한다.
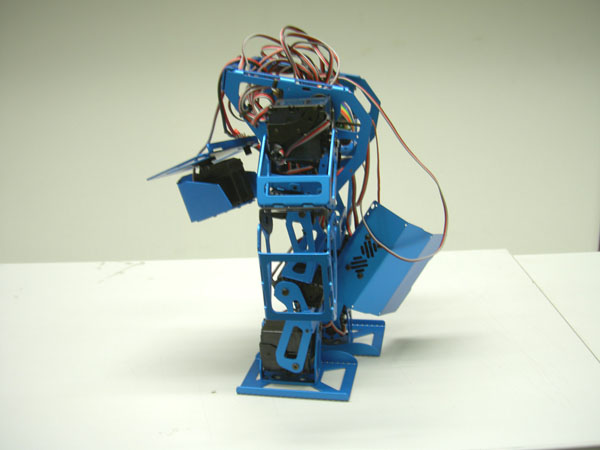
로봇을 안정적인 자세로 만든다. - 무릎을 꿇리는게 좋다.
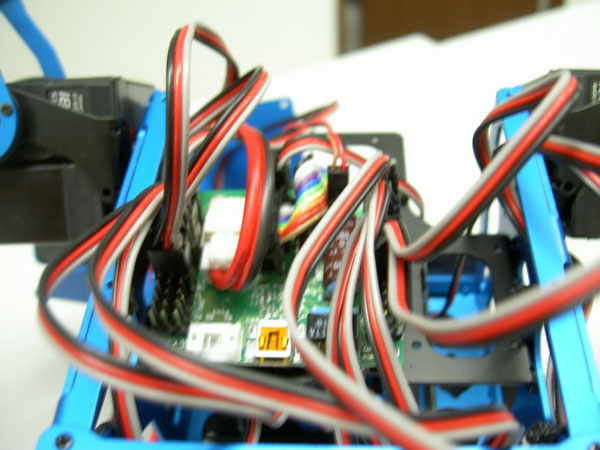
설명서를 보면서 배선을 보드에 연결한다. - 선의 흑, 적, 백 색깔에 주의한다.
머리와 스피커의 배선을 보드에 연결한다.
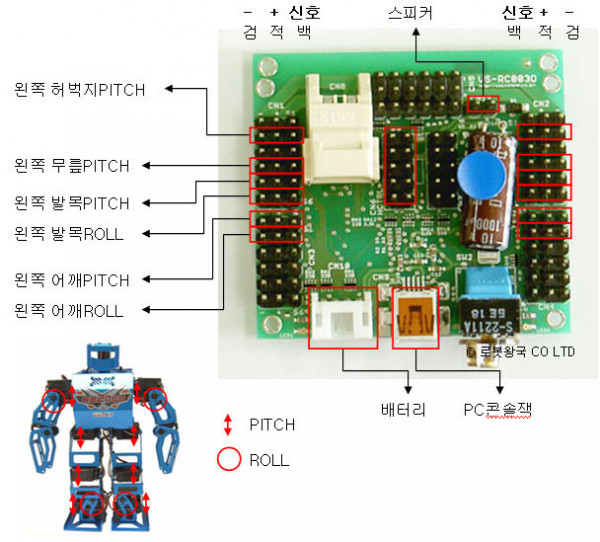
각 연결부위와 보드의 핀을 확인한 후 연결한다. - 롤과 피치 확인. 서보모터를 18개 더 확장할 수 있다.
| |
|
몸체 상판 조립
배터리 격납
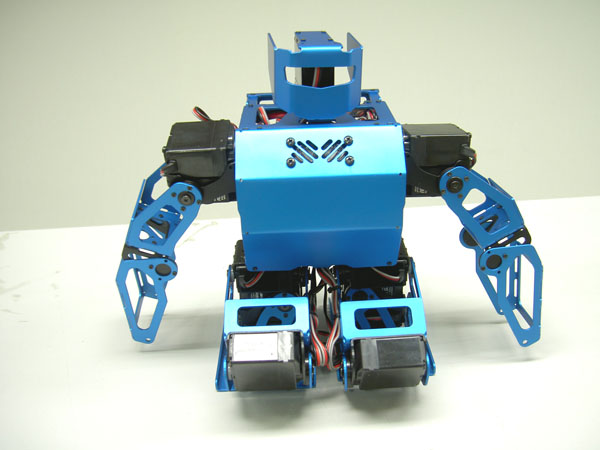
가슴판 조립
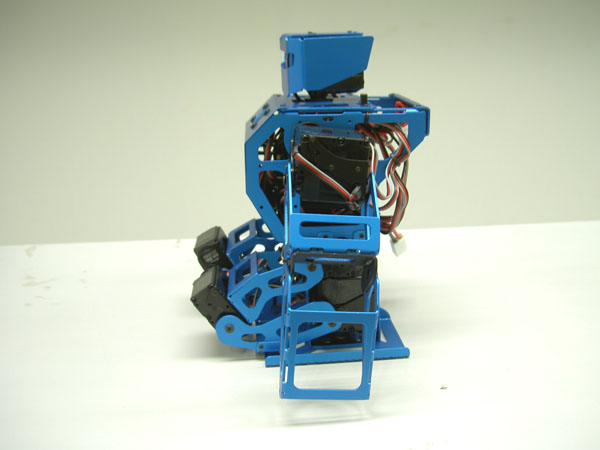
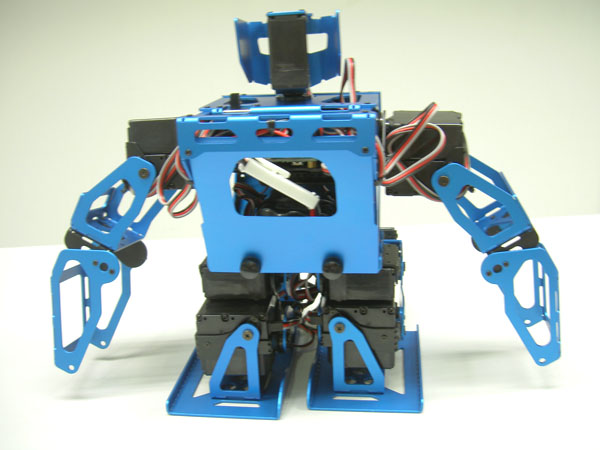
조립 완료된 옆모습
| ||
|
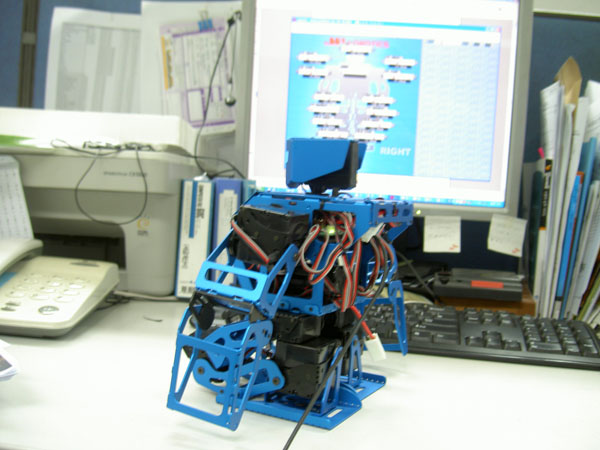
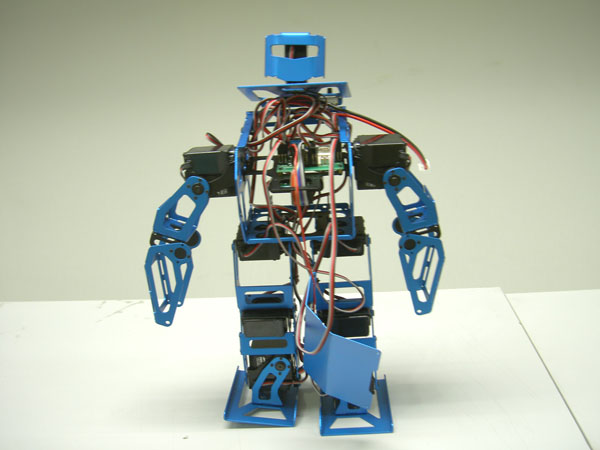
초기 세팅이 완료되면 등판을 조립하고 배터리를 연결한다.
| 서보모터 가동 시에는 반드시 등의 손잡이를 잡거나 거치대에 걸어놓고 해야한다. |
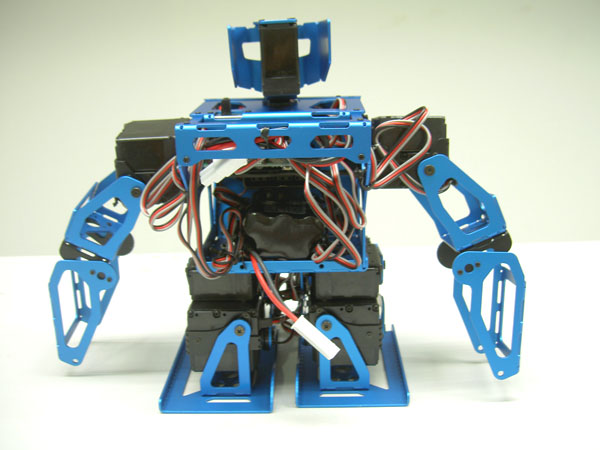
| 조립 완료된 모습 |


관련링크
- http://6541 34회 연결
댓글목록
등록된 댓글이 없습니다.