휴머노이드 RQ HUNO 프로그래밍
페이지 정보
작성자 로보몰-아이파… 댓글 0건 조회 19,346회 작성일 13-10-08 22:40본문

안녕하세요 이번포스팅을 도와줄 휴머노이드 RQ HUNO입니다.
RQ 160/ RQ HUNO
다 똑같은 모델이니.. 왜 이블로그는 RQ 160이랬다가 RQ HUNO랬다가 하지 ? 라고 생각하지 말아주시고..
포스팅 들어갑니다 ~
위 링크로 들어가신다음 SUPPORT부분 자료실에보시면 모션빌더를 설치하실수 있습니다 .
위 프로그램을 다운받아주시고 압축을풀어주세요
그러면 위 모션빌더라는 프로그램이 생성될텐데 . 실행시켜주세요~
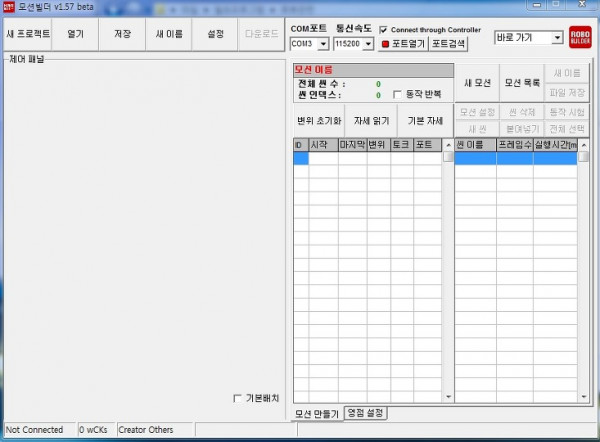
그럼 요런프로그램이 실행이됩니다!
맨위 중간에보시면 포트검색이라는 항목이있는데 일단 RQ 휴노를 상자에 동봉되어있던 USB로 연결해주신다음 포트검색을 눌러주세요
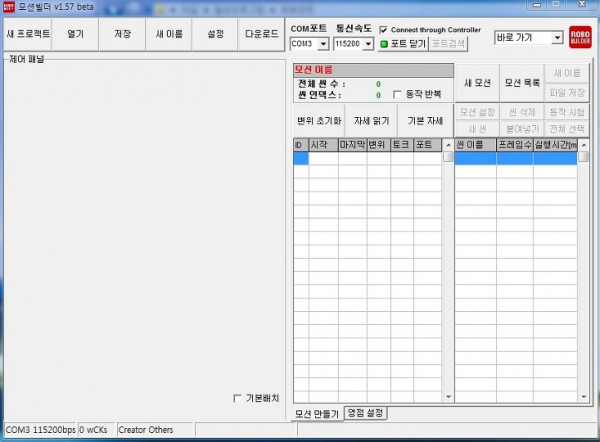
고럼 요렇게 빨간색이었던 포트열기부분이 초록색으로변하며 포트닫기버튼으로 바뀝니다. ㅎㅎ;
그다음 새프로젝트를 눌러주시고~
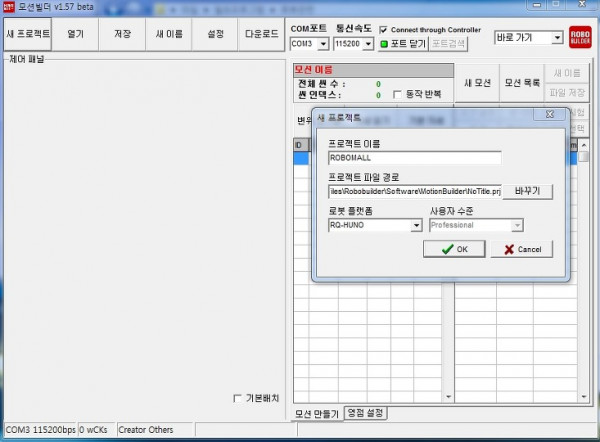
그럼 요런창이 하나실행이되는데 저희는 프로젝트이름을 로보몰로 하겠습니다 .
프로젝트 이름은 큰상관은없으니 내키시는대로 정해주시고 로봇플랫폼
이 항목은 여러 종류가있는데 저희가 하고싶은건 RQ 휴노이니 다른건무시해주시고 RQ 휴노로 정해주세요 ~~
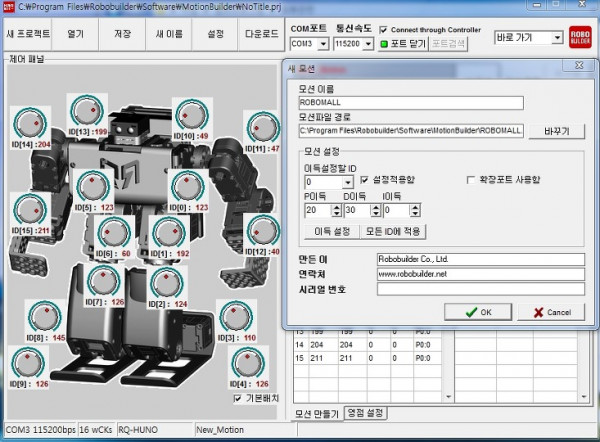
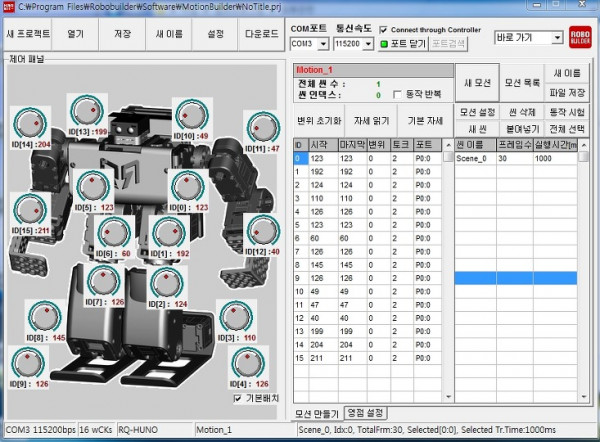
고롬 요렇게 휴노의 3D버전이 뜰건데요 지금 창에가렸는데 우측 중간부분에있는 새모션이라는 버튼을 눌러주세요 ~
그럼 요런창이뜹니다 . 저희는 또 모션이름도 로보몰로하겠습니다. 모션이름도 큰상관은없습니다 .ㅋㅋㅋㅋ
이제 저기보시는 3D 휴노위에 각 서보모터 ID별로 동그란게 활성화가 되있으실건데요. 저희가 진행할 모션제작을 도와주는 역할입니다 .
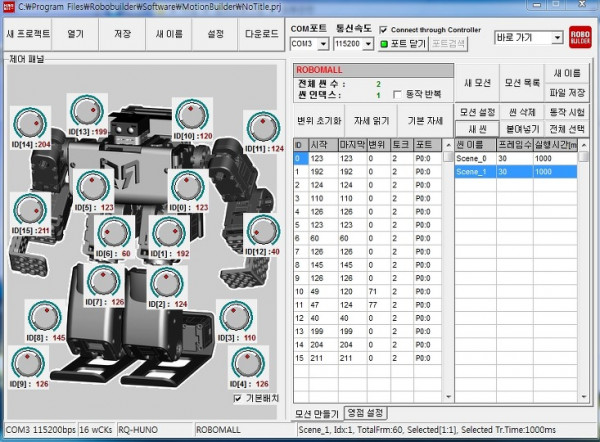
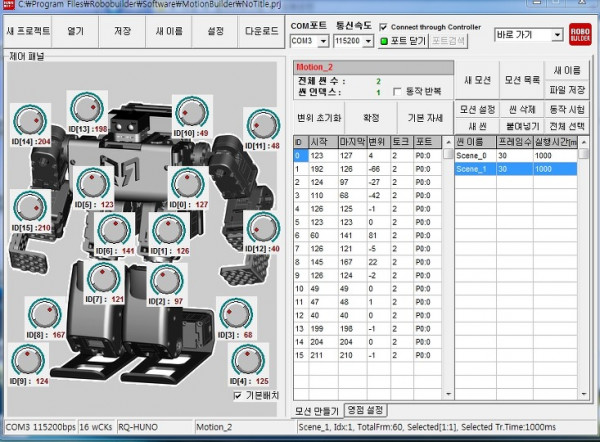
이제 그다음 새씬이라는 항목을 눌러주세요 일단 첫씬은 무조건 무조건 기본자세여야하니깐
씬 0번으로 놔둬주세요~ 그럼 휴노가 알아서 자세를 잡을거에요 . 그럼저희는 새씬을 한번다시눌러서 씬 1을 짜주면되요 ~
저는 손흔들기 모션을 예로 제작해보겠습니다. 보시면 ID 10,11번의 빨간점위치가 바뀐걸 보실수있는데요.
저런식으로 빨간점위치를 조정해주시면 연결된 휴노도 실시간으로 움직입니다 .
그래서 보다 손쉽게 어느정도 돌려서 어느모션을 짜야겠다.. 라는걸 쉽게 정하실수가 있구요 ㅎㅎ
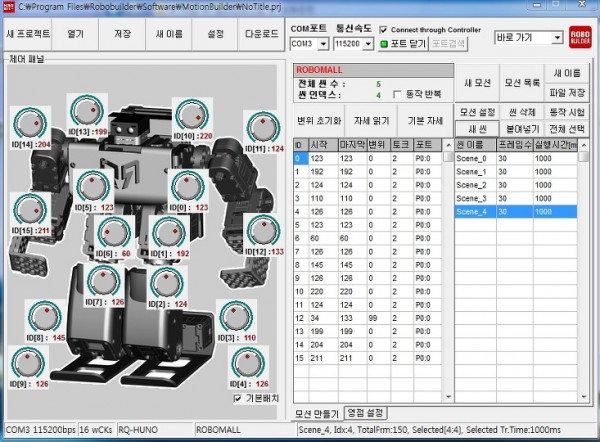
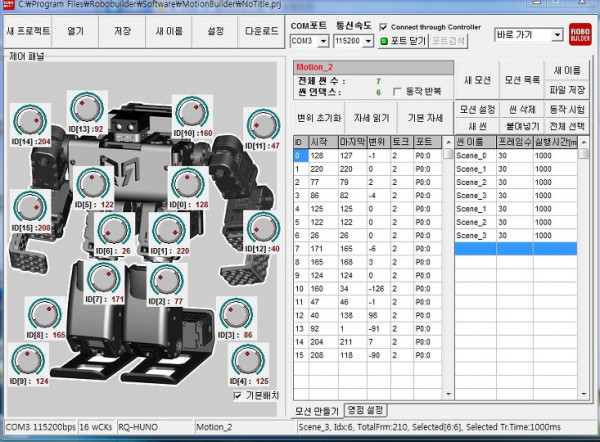
중간씬을 찍은 이미지들이 오류가떠서 ... 급격히 진행되어 씬 4까지왔습니다 .. .
이제 모션들을 다 짜셨다 하시면 한번확인해주실게있는데요 . 바로 새씬의 옆 옆에 있는항목인 전체선택과 동작확인버튼입니다 .
모션들이 다 잘짜져있나~ 요걸확인하시려면 전체선택 동작확인을하시면 . 씬 0번 기본자세부터 씬 N번 마지막 짜신 자세까지 한번
슈르륵 보여주는데요 저항목으로 확인하시면 됩니다 ~
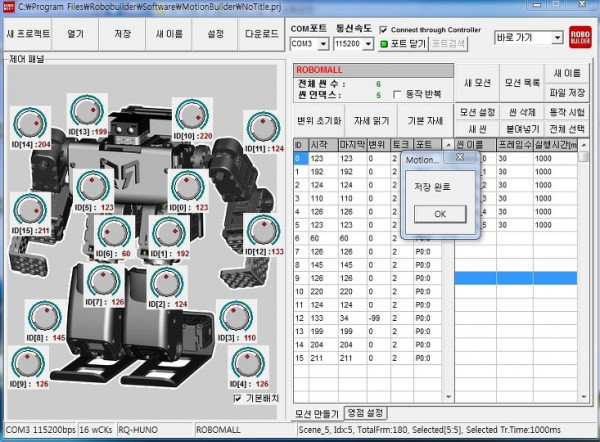
이제 다 모션을 짜셨으니 휴노로 전송을 해주셔야겠죠~ ㅎㅎ
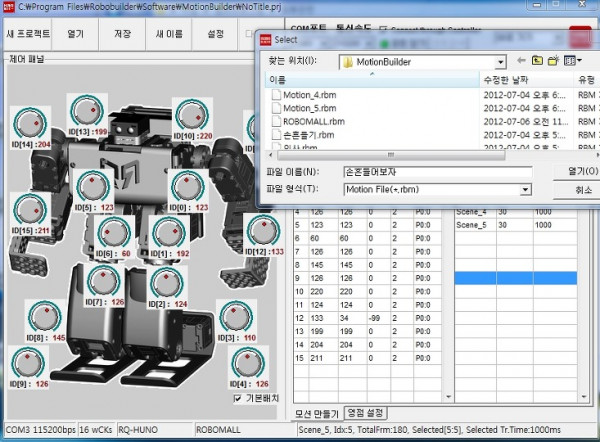
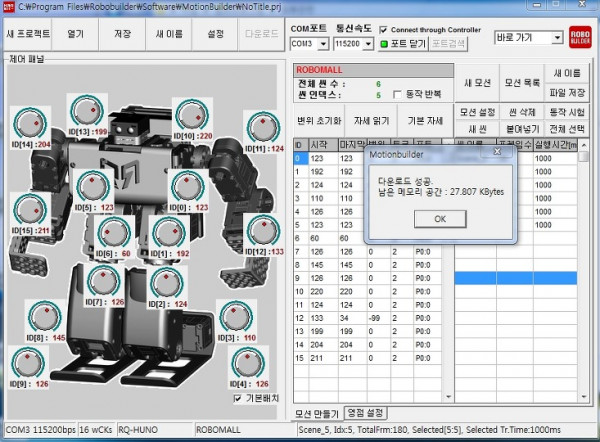
위의 모션 목록 오른쪽 파일저장 -> 좌측상단 저장버튼 - > 다운로드를 누르시고 정하셨던 모션,프로젝트명 선택하시면 로봇으로
전송이 완료가 됩니다!
이제그러면 휴노 전원을키시고 기본자세를 잡으신다음 1번버튼을 눌러주시면 움직이는데 ..
이런생각을 하시는분들이 계실거라 봅니다.
언제 저걸 다맞춰서 모션을 짜지 ?? 라는분들이 계실겁니다 ..
그래서 우리 모션빌더에게는 자세읽기 라는 기능이있습니다 .
요렇게 중앙에보시면 자세읽기 라는 버튼이있는걸 보실수있는데 . 요 자세읽기를 누르시면
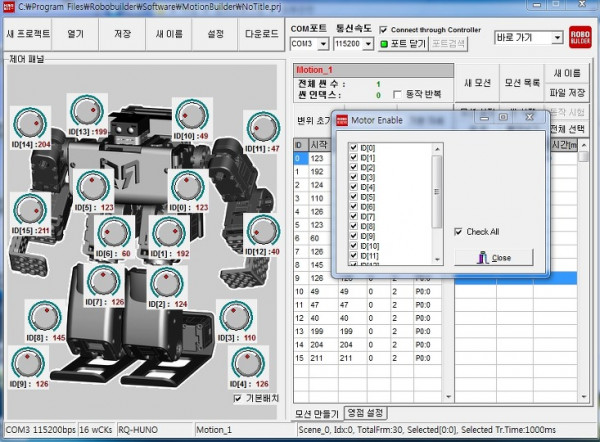
요런창이 뜨게됩니다. 이건 무슨창이냐면 기본으로 모션빌더를 실행하셔서 포트를연결하시는순간 서보모터에는 힘이들어갑니다 .
자세를읽어서 모션을짜려면 서보모터를 원하는자세로 돌려야하는데 .힘이들어가있는상태에서 억지로 모터를 조절하면
100퍼센트 무조건 망가집니다 .. 그걸방지하기위하여 .. 서보모터에 힘을풀어주는건데요
체크되있는 ID N번의 모터는 무조건 해제됩니다.
만약 아 이부분은 안풀렸으면 좋겠다 하시는부분은 체크를 안하시면 되겠죠 ?

자세가 좀추하지만 이런자세를 손으로잡아주시고 다시 모션빌더창을보시면
변위 부분이 바뀐걸 보실수있습니다 .이렇게 얼마나 모터가움직였는지 자세읽기기능으로 읽을수가있어서 저희가
해줘야할건 자세를잡으신후 확정~~~ 이 버튼만 눌러주시면 됩니다 .
이제이렇게 원하시는 자세를 다 자세읽기로 쭈르르륵 짜시면됩니다 .
근데 왜 씬 3다음 4가아니라 다시 1. 2. 3. 인지 궁금해 하시는분들이 계실텐데요.
모션을 짜시다보면 똑같은 동작을 반복하셔야하는부분이 있을겁니다 .
그래서 있는것이 마우스 우클릭 복사 붙여넣기 끼워넣기 덮어쓰기 기능인데요
한번에 여러개까지 드래그해서 복사가되니 반복모션은 다시일일이 짜버리는 고생은 우리하지말아요 ㅠㅠ
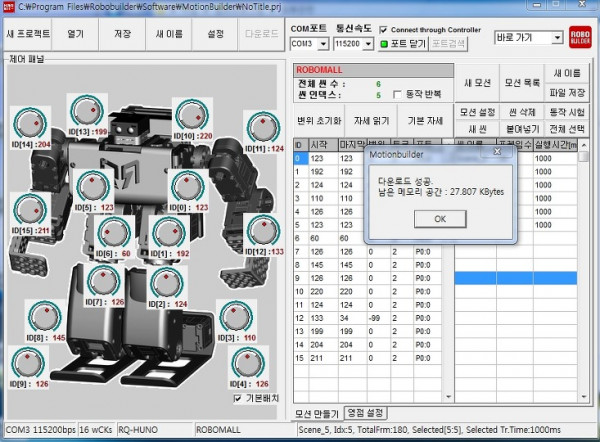
자 다시이제 위의 다운로드 방법을 이용하여 휴노로 전송해주면 끝~~
이제 전원을키셔서 모션을 관람하시면 됩니다~!
모션빌더의 장점은 로보빌더와 RQ 휴노가 서로 모션파일을 같이쓸수 있다는점인데요 .
만약 휴노만 가지고계시는분이면 미리 연습해두셨다가 로보빌더에 프로그래밍하셔서 단계를 높여나가실수도
있겠네요ㅎㅎ
이제 호비스가 조립이 거의 다되어가는데 조만간 호비스는 포스팅으로 찾아뵙기로하고
항상 매번부족한 포스팅이지만 나름 열심히 열심히 썼으니 좋게 지켜봐주셨으면 감사하겠습니다 .ㅠ 모르시는것은
저희매장이나 블로그에 댓글달아주시면 최대한 빨리답변달아드릴 예정이니 많은관심 부탁드리고
저는 아까 짰던 모션동영상들 올리며 포스팅 마치겠습니다 .감사합니다.

출처 http://robomall3.tistory.com/category/【휴머노이드】
로보몰-아이파크 용산점님
관련링크
- http://5052 36회 연결
댓글목록
등록된 댓글이 없습니다.