스피시즈 로봇 킷
페이지 정보
작성자 로보맨 댓글 0건 조회 44,923회 작성일 09-07-08 14:16본문
111111111111111111111111111111
2005연 2월호 특별 기획 :
지난연말, 일본에서 주로 기성품 RC 서보모터를 이용한 방식의 로보원급 소형로봇 2~3개가 발표되었습니다. 2004년의 로봇붐을 2005년에도 무난히 이어갈 것 같은 예감이 듭니다. 오늘은 지난 2004년 12월6일에 발표된 '스피시즈' 로봇 킷에 대한 내용을 전해드리겠습니다.
NetBSD / PowerPC로 움직이는 2족 보행로봇 - Speecys(스피시즈)
NetBSD 베이스의 OS를 사용하고, PowerPC CPU를 장착한 2족 보행로봇 Speecys(스피시즈)는 지난 2004연12월6일 판매되기 시작했습니다. 가격은 일본 현지가격 522,900엔(세금 포함).
패키지는 완품이 아닌 조립킷 형태의 부품들로 이루어져 있고 각종부품과 메뉴얼, 모션생성에디터와 리모트콘트롤 소프트웨어가 들어있습니다. 초보자의 경우에는 1주일 정도 , 조립에는 능숙한 사람도 1~2일 걸린다고 합니다. 만약 조립에 실패하더라도 다시 분해하면 되기 때문에 망가질 염려는 없습니다.
Speecys의 사양
1. 관절 가동부 자유도(합계 23자유도)
- 머리 2
- 팔 4x2본
- 상반신 회전 1
- 각부 6×2본
2. 머리 부분 인터페이스
- 자유도 2
- LED(눈 부분) 3색x2세트
- 35만 화소CMOS칼라 카메라 1개
- 스테레오 마이크 입력 1세트
- 음성 출력용 스피커 1개
3. 외부 접속용 범용 인터페이스
- 무선LAN표준 장비(IEEE 802.11b준거)
4. 센서
- 쟈이로 센서 1(2축,3축 옵션)
- 3축G센서 1세트
- 발바닥 터치 센서 최대6개×2족(옵션)
- 그 외 터치 센서 최대6개(옵션)
- CMOS칼라카메라 1개
- 마이크 2개
4. 배터리
- 니켈 수소 전용 전지9.6V 2000 mA
5. 크기/중량
- 크기 약40cm
- 높이 약3.5kg
6. 소비 전력
- 약 1.7A(무릎을 굽힌자세로 서있을경우)
- 약 4A전후(Speecys_Dancing 때)
7. 동작시간
- 약15~30분 (스피시즈에 의한 측정)
8. 충전 시간
- 약1~2.5시간(충전 전류에 의한다 )
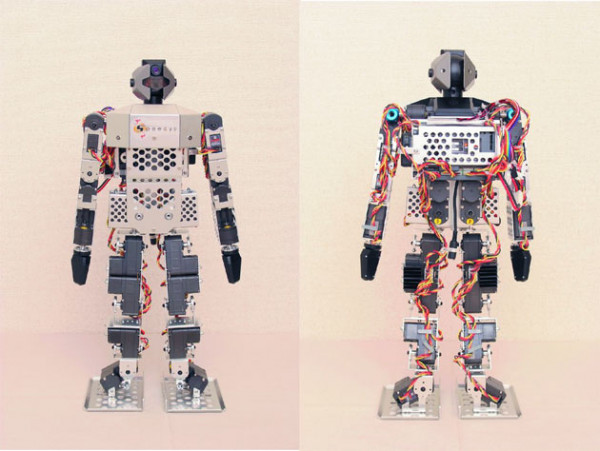
Speecys 정면, 후면
로봇 OS용으로 개발된 SpeecysOS는 NetBSD 1.x을 베이스로 하고 있습니다. 스피시즈에 의하면 바로 최근 릴리스 된 NetBSD 2.0는 충분히 안정될 때까지 시간이 걸릴 것 같기 때문에 3.0가 릴리스 될 때까지는 1.x 베이스를 계속 사용하게 될 것 같습니다.
옵션 부품의 판매나 Speecys를 이용하는 게임의 개발 계획이 Web사이트에서 공개되어 있습니다. 자세한 것은 다음의 URL을 참조하시기 바랍니다.
http://speecys.robo-pro.com/firmware.html#apli
Speecys 개발자 인터뷰
지금부터는 itmides.co.jp에 실린 Speecys 로봇 킷의 개발, 판매원인 스피시즈의 대표의 인터뷰를 소개하겠습니다.
Q: Speecys로봇 킷을 주문하고 있는 손님은 어떠한 분들이 많은 편입니까?
A: 실제로 주문을 받고 있는 것은 UNIX를 다룰 수 있는 분들이 많은 듯 합니다. 로봇 매니아들이 아니라 새로 로봇을 공부해 보려는 UNIX계가 많다는 인상을 받았습니다.
Q: UNIX를 다루는 분들중 스스로 무엇인가 만지거나 만들거나 하고 싶다고 하는 사람들이 많이 있는 편인가요?
A: 지금 개인용으로 판매되고 있는 것 같은 로봇의 CPU는 힘이 약한 것이 많네요. OS를 담을 여유는 없어서 오브젝트를 다운로드해 그대로 실행이라고 하는 상태입니다. 그것들에 비하면 Speecys는 쭉 환경이 갖추어지고 있다고 말할 수 있습니다. 소프트웨어 쪽을 본격적으로 다룰만 한 상태라고 생각해요.
지금까지 로봇을 다루는 분들은 제어계에 흥미를 가지고 있는 것 같은 하드웨어 쪽이 많았지요. 그러니까 로봇이라하면 아무래도 「메카」적인 요소가 중심의 이야기가 되어 있었습니다.
그에 대해 Speecys라고 하는 형태로 어느 정도 만지기 쉬운 확장성이 있는 하드웨어와 필요한 드라이버나 라이브러리를 준비했으므로 이후로는 소프트웨어 분야의 몫이라 생각하고 있습니다.
우리는 소프트웨어 분야에서 무엇인가 재미있는 것을 만들고 싶어지는 것 같은 플랫폼을 목표로 하고 있습니다.
Q: OS의 베이스로서NetBSD를 채용한 이유는?
A: 라이센스문제입니다. 자유롭게 사용할 수 있는 OS라고 하면 Linux도 있습니다만, Linux는 라이센스상 원시 코드를 공개 하지 않을 수 없기 때문입니다.
Q: 그렇다면 , 원시 코드의 공개 예정은?
A: OS에 관해서는 기본적으로 바이너리만 배포를 할 예정입니다. 원시 코드를 공개할 예정은 없습니다.
Q: 호환성은? 다른 NetBSD 환경에서 크로스 컴파일 한 소프트웨어를 Speecys위에서 동작 당합니까?
A: 호환성은 있습니다. i386 베이스 NetBSD 위에서 크로스 컴파일 한 것은 움직입니다. 그러나 LED를 시작해 독자적으로 준비해 있는 디바이스나 서보의 제어 방식으로서 채용하고 있는 RS-485 등이 관련되어 오는 경우는 별매의 라이브러리를 사용해 개발하게 됩니다.
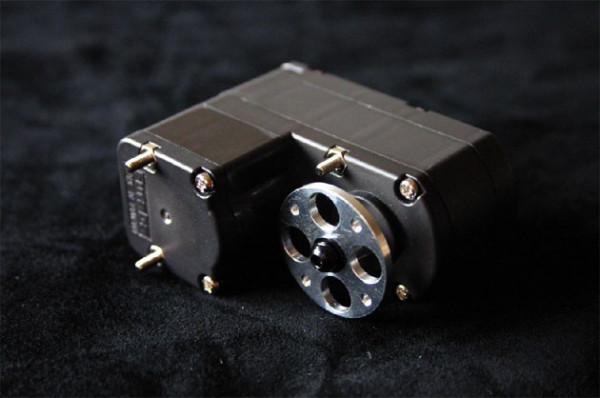
후타바 전자공업제RS601CR로보트 전용 서보(클릭으로 확대)
후타바 전자공업제RS601CR로보트 전용 서보의 사양
치수 59.0×26.0×47.1mm
중량 93g(축 , 알루미늄 호른 없음 상태로 )
동작 속도 0.17sec/60о(9.6V)
가동 범위 240도
출력 토르크 21kg·cm(9.6V)
전원 전압 9.6V
제어 방식 RS-485(127개까지 접속 가능)
통신 속도 최대1.3Mbps
통신 방식 쌍방향 , 커멘드식 , 반2중
센스 정보 각도 , 토르크 , 온도 등
calibration 있음 : 25점 보정
내구성 통상의 무선조종 서보의10배 정도(스피시즈에 의한 실험 결과)
비고 서보 위치의 정보 취득이나 제어 , 부가 정보 취득이 가능
Q: 개발 환경의 가격은?
A: 10~20만엔이군요. 내용에 의해 Level 0~3의 구분이 있어 레벨별로 가격이 다릅니다.
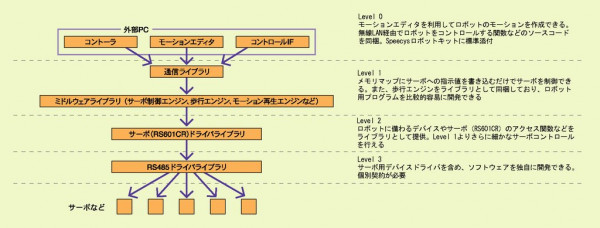
Speecys Development Software과 개발 레벨
Q: 다른 하드웨어나 파츠를 제작해 Speecys에 접속해 움직일 수 있습니까?
A: RS-485에 의한 통신을 할 수 있는 것이면 사용할 수 있습니다. 다만, 무엇을 하고 싶은 것인지 목적에 의해 라이브러리의 레벨을 선택할 필요가 있네요.
Q: 조작하는 단말은 PC을 기준하고 있습니까?
A: PC와 죠이스틱입니다.
A: Speecys 안에서 서버가 내장되어 있어 거기에 커멘드를 보내고 있을 뿐이므로 그 2개만으로 상관없습니다.
Q: 자료에서는 Web서버가 실려 있다고 하는 것입니다만?
A: Apache가 탑재되어 있습니다.
Q: Apache에 대해서 커멘드를 보내고 있어?
A: 전용의 컨트롤 모듈이 있어 기동하고 있습니다. 독자 패킷을 정의되어 있으므로, 거기에 맞추어 커멘드를 보내 컨트롤 합니다.
Q: 클라이언트 소프트웨어는 어떠한 것이 있습니까?
A: 컨트롤용 소프트웨어가 킷에 부속되어 있고 그것을 사용해 조작할 수 있게 되어 있습니다.
Q: 상정 클라이언트OS는?
A: 현재 Windows뿐 입니다. 개발 환경 쪽은 NetBSD을 상정하고 있습니다만 (웃음).
Q: Linux나BSD계 OS전용으로 유저가 스스로 컨트롤용 소프트웨어를 만들 수 있습니까?
A: 할 수 있어요. 원래는 그렇게 하는 것으로 설정했습니다.
Q: 그 때에 필요한 정보는 패킷의 정의 내용입니까.
A: 네. 클라이언트측 PC로부터 조작하는 경우는 그렇네요. 그리고, 패킷 정의 내용은 공개 예정입니다.
Q: 예를 들면 Ruby 이나 Perl, Python등으로 스크립트를 짜 패킷을 생성해, 커멘드를 보낼 수 있다고 하는 것입니까?
A: 할 수 없는 것은 없네요. 그리고, 통상의 UNIX 프로그램이 움직이므므로 Speecys 위에서 동작하는 자신 전용의 서버를 짜 움직일 수도 있어요.
Q: 서버를 만들어도 상관없습니까?
A: 네. Speecys의 안에 RC-485나 서보용 라이브러리가 있습니다.
Q: 서버에 무엇을 사용할까입니까.
A: 그것은 나카에 들어가 있는 일반적인 소프트웨어를 사용해도 괜찮습니다. 스스로TCP/IP베이스의 전용의 것을 개발해도 괜찮습니다.
Q: 커넬의 튜닝 내용에 대해 가르쳐 줄 수 있습니까?
A: 통상의 커넬의4 00배 정도 빨라지고 있습니다. 거의 1밀리 세컨드의 정밀도가 되도록 하고 있습니다. 커넬 자체의 클락 스피드의 정의를 튠 업 해 , 멀티태스킹의 쉐어링 간격을 극단적으로 작게 하고 있습니다. 일반적인 방법이라면 100밀리 세컨드정도 밖에 안 되기 때문에, 그것이라면 서보가 제어하기 어렵습니다.
Q: 그 만큼 CPU 파워를 사용한다고 생각합니다만, 아직 여유는 있습니까?
A: 좀 더 여유가 있습니다만.
A: 실용상은 약1밀리 세컨드로 딱 좋은 느낌으로 움직이네요.
A: 리얼타임 커넬이 아니라도, 안될까라고 하는 느낌입니다.
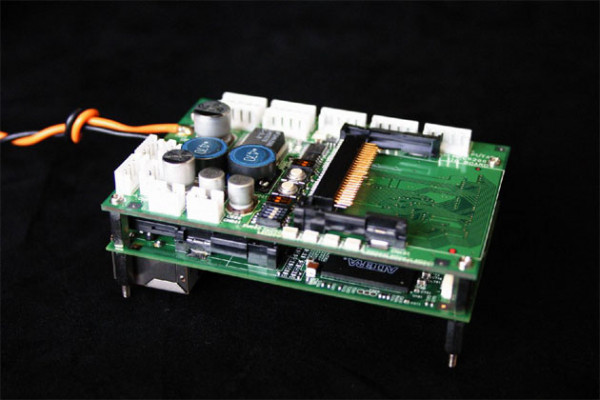
프로세서 유니트RPU-100의 내부(클릭으로 확대)
프로세서 유니트RPU-100사양
CPU MPC5200(264~400MHz,PowerPC 603e코어)
ROM FLASH MEMORY 16MB
RAM DDR SDRAM 128MB
OS SpeecysOS(NetBSD베이스)
FPGA 각종 타이밍 생성 그 외
CF슬롯 메모리 카드 CF×1, 무선LAN(802.11b) 용CF슬롯×1
Serial I/F RS-232C×1ch
Audio I/F AC97 CODEC대응
Audio 스피커×2, 마이크×2
Camera NTSC
표시용LED 단색(색에 대해서는T.B.D)×4
RS485 Serial I/F 모터·센서류의I/F용×7ch
외부용5V전원 5V×2ch
PWM출력 PWM×2ch(머리 부분용)
서버노우 WWW·FTP·TELNET서버
외부 치수(mm) W91×D55(돌기물 포함하지 않고 )
전원 사양 DC9.6V니켈 수소 배터리
Q: 모션 관련 라이브러리는, 보행 엔진과 모션 재생 엔진의 2종류라고 하는 것입니다만?
A: 모션 재생 엔진은, 모션 에디터로 만든 데이터를 재생하는 것입니다. 보행 엔진은 그 개조판으로, 보행하고 있는 모션 데이터를 재생하는 것이군요.
Q: 무선LAN으로 통신해 모션 데이터를 보내고 있습니까?
A: 아니요 보내고 있는 것은 커멘드만입니다. 모션 데이터는 CF 카드의 빈 용량 부분이 약30MB있으므로 거기에 두거나 온메모리로 가질 수 있게 되어 있습니다. 거기에 임의의 번호의 모션을 재생하라고 말하는 커멘드를 보내고 있습니다.
Q: 등록할 수 있는 모션 데이터의 수는 몇 개 정도입니까?
A: 모션 데이터는1파일 해당하고 대체로200KB이므로 원하는 만큼 등록할 수 있어요 (웃음).
Q: 타임 슬라이스는 어떤 것 정도입니까?
A: 제어적으로는 서보가 받아들이는10밀리 세컨드군요. 다만 , 모션을 만들 때는 타임 슬라이스는 별로 없어요.
A: 예를 들면 「있는 포즈로부터 다음의 포즈까지10초에 움직일 수 있다」라고 명령하면 모션 재생 엔진이 자동적으로 보완하면서 동작합니다. 킷 부속의 모션 에디터로 간편하게 움직임을 붙일 수 있으므로 , 여러 사람에 도전해 봐주었으면 좋겠어요.
출처 : http://www.itmedia.co.jp/enterprise/articles/0501/18/news022_1.html
---------------------------------------------------------------------------
로봇에 대한 생각이 많아지면서, 워낙 로봇의 분야가 많다보니 어떤 것이 진정 로봇의 최고봉인가에 대한 고민이 커지고 있습니다. 많은 로보맨들이 한번쯤 겪는 통과의례가 아닐까 여겨봅니다. 제대로 설계되어 제작된 하드웨어와 간결하면서 탄탄한 소프트웨어. 모두다 잘하면 금상첨화겠지만, 스피시즈 같은 하드웨어 플랫폼을 이용하면 후자쪽에 좀더 신경을 쓸 수 있으리라 생각됩니다. NetBSD베이스, PowerPC채용, 게다가 소프트웨어 엔지니어를 위한 플랫폼 만들기를 목표로 하는 로봇.. UNIX USER들은 좋겠습니다. ^^
http://www.speecys.com/ [이 게시물은 로보맨님에 의해 2013-09-14 22:27:39 robo_컬럼&탐방에서 이동 됨] [이 게시물은 로보맨님에 의해 2013-09-14 22:54:45 리뷰에서 이동 됨]
댓글목록
등록된 댓글이 없습니다.