[탐방] 휴머노이드의 메카 - 와세다대학
페이지 정보
작성자 로보맨 댓글 0건 조회 15,491회 작성일 09-06-25 23:56본문
111111111111111111111111111111
요즘들어 부쩍 TV를 통해 로봇에 대한 기획물을 많이 접하게 된다. 같은 주제로 방영된 몇년전의 로봇기획물에 비해서 볼거리가 풍부해 것을 느낄 수 있다. 기획물들을 보면서 느끼는 점이 두가지있다.
첫째는 옛말에 이르길, 백문이 불여일견이라 했거늘.. 백마디 말보다는 한장의 사진이, 또 수백장의 사진보다는 단 몇초의 동영상이 주는 느낌은 역시나 다름을 느낀다. 두번째 느끼는 것은, 로봇의 이야기가 나오면 빠지지 않고 언급되거나 보여주는 곳이 있으니 바로 일본의 와세다 대학. 휴머노이드의 메카로 불리우는 곳에 관한 이야기이다.
와세다 대학과 이치로 가토교수
휴머노이드의 메카라 불리우는 와세대 대학을 언급하면서 빠지지 않는 것이, 휴머노이드의 대부라 불리우는 동대학의 이치로 가토교수이다. 1994년 사망하기까지 이치로 가토교수는 30여년을 넘게 와세다 대학에서 그의 제자들과 휴머노이드에 대한 연구와 제작을 했다. 최고의 휴머노이드 로봇인 아시모를 개발한 일본 로봇계의 내면에는 가토 연구팀이 개발한 많은 기술과 그곳에서 배출된 핵심 인력들이 밑거름이 되었다는 사실을 일본의 로봇연구원들의 인터뷰 곳곳에서 발견할 수 있다.
가토가 이끄는 와세다 대학 연구팀의 로봇 개발은 1973년 최초의 실물크기 휴머노이드인 와봇(WAseda roBOT) 1를 시작으로 현재에 이르기까지 휴머노이드 개발에 많은 업적을 쌓아놓았다. 일례로 2족보행로봇에 적용되는 ZMP 보행메커니즘이 당시 가토 교수의 제자이자 연구원인 아쓰오 다카니시에 의해 개발되어 아시모를 비롯한 거의 모든 2족보행로봇에 적용되고 있다. 현재 아쓰오 다카니시는 와세다 대학의 연구원으로써 일본 정부의 지원아래 와비안 알투 로봇의 제작을 담당하고 있다.

와봇-1 (1973)
세계 최초의 본격적 인간형 지능 로봇이며, 수족 시스템, 시각 시스템, 음성 시스템으로부터 구성되어 있다. 기능으로서는, 인공의 입에 의해 인간과의 커뮤니케이션을 간단한 일상 회화로 실시해, 원격 수용기로서의 인공의 이·목에 의해 대칭물을 인식해 거리·방향을 측정해, 2켤레 보행에 의해 이동, 촉각을 가지는 양손으로 물체의 파악·이동 등의 작업을 실시하는 것이 가능하다. 이것은 인간에게 비유하면 1세반정도의 유아의 능력에 필적한다. 덧붙여 인간의 손에는 WAM-4, 인공의 다리에는 WL-5가 사용되고 있다.

WABOT-2 (1984)
연구실은 연구 그룹으로서 재구성, 연구실이 WABOT-1 이후 축적해 온 연구를 종합 하는 프로젝트 WABOT-2의 목표 설정을 개시했다. WABOT-2는 WABOT-1과 같은 범용형 로봇이 아닌, 인간의 지적 일상 작업 중에서 정교함이 요구되는 예술 활동를 설정, 그것을 실현하는 말하자면 스페셜리스트 로봇으로서 목표를 건반악기 연주로 설정하였다.
뮤지션 로봇 WABOT-2는 인간과 일본어로 자연스러운 회화를 할 수 있고, 악보를 눈으로 인식해, 양손 양 다리로 전자 오르간을 연주한다고 하는 기능을 갖고, 능력으로서는 중급 정도의 곡의 연주가 가능하다. 게다가 인간의 가성을 인식해, 자동 채보를 실시해, 이것을 기초로 인간의 가성에 맞추어 반주 할 수가 있다. 1985년 쓰쿠바 과학박람회에서 오르간을 연주하여 많은 사람들의 관심을 받았다.
세계 최초의 휴머노이드 로봇인 와봇의 제작에 이르기까지, 또 이후의 연구성과를 한눈에 볼 수 있도록 와세다대학의 로봇을 정리해본다.
와세다 대학의 2족보행로봇 개발사
2족 보행로봇의 연구는 19671년부터 개시되었다. 2족 보행을 기계 모델에 의해 실현되는 것으로, 인간의 보행 메카니즘을 공학적 시점으로부터 해명하는 것을 목적으로 하고 있다. 기계 모델로서 중량 모델을 이용한 WL(Waseda Leg) 시리즈와 경량 모델의 WAP(Waseda Automatic Pedipulator) 시리즈의 2개의 흐름이 있다. 전자는 구동원에 유압을 이용해 후자는 공기압을 사용해 고무 인공관계를 구동하고 있다.
WAM-1 (1967)
하지 모델 :WL-1
생체 하지부의 보행 기구 및 기능에 주목해 그 기초 데이터를 해석해, 하지부의 모델화를 시도 인공의 다리 모델을 설계 제작했다. 실험의 결과, 보행 동작의 기본적인 메카니즘을 확인했다.
WL-3 (1969)
조종형 모델 :WL-3
복동형실린더를 전기 유압 서보 방식에서 제어하는 조종형 모델 WL-s를 설계 제작해 인간의 유각상 및 입각상동작, 게다가 2켤레로 직립 및 자리정도 상태 보관 유지를 실현했다.

WAP-1 (1969)
고무 인공관계의 도입:WAP-1
정특성 실험에 의해 최적 형상을 결정한 고무 인공관계를 액츄에이터로서 이용해 코의 자형족부를 가지는 인간형 공기압식 2켤레 보행 기계 WAP-1을 시작해, 티칭·플레이백 제어에 의해, 2 차원 2족 보행을 실현했다.

WAP-2 (1970)
대형 인공관계의 도입:WAP-2
종래의 고무 인공관계를 아득하게 상회하는 특성을 가지는 대형 고무 인공관계를 액츄에이터로서 이용해 발바닥에 감압 센서를 가지는 2족 보행 기계 모델 WAP-2를 시작해, 센서로부터의 피드백에 의해 자동 자세 제어를 실시하는 보행 실현의 전망을 얻었다.

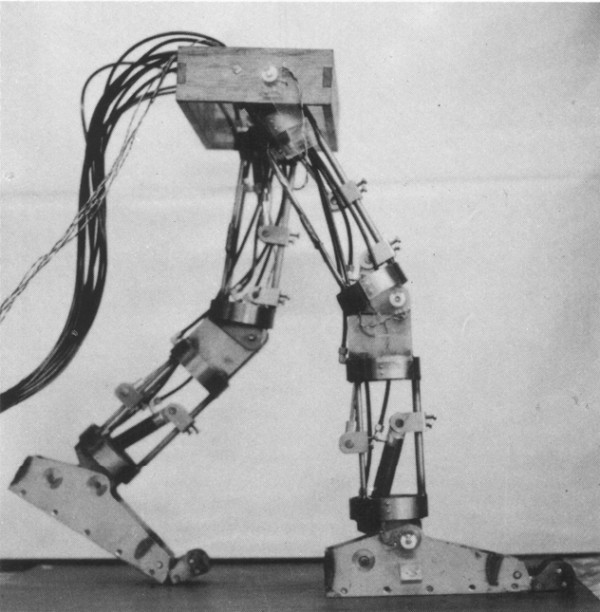
WAP-3 (1971)
경량 모델에 의한 2켤레 보행의 실현:WAP-3
WAP-2를 토대로 해, 족저에 좌우 방향의 중심 이동 기구를 가세해 액츄에이터를 PWM 구동으로 변경해, 제어장치에 메모리를 이용한 WAP-3을 개발해, 평지, 경사면, 계단 보행, 한층 더 평지 방향 전환도 실현되었다. 이것은 세계 최초의 3 차원 자동 2족 보행의 실현이다.

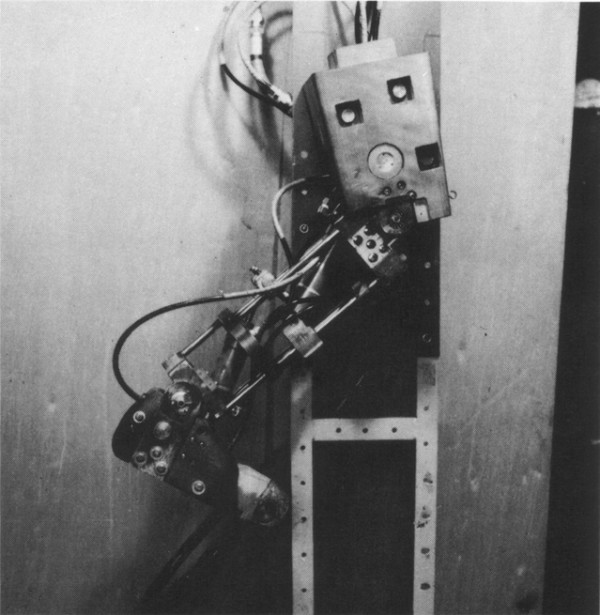
WL-5 (1971)
중량 모델에 의한 정보행의 실현:WL-s
상체에 중심 이동의 자유도를 가져 30 kg까지의 부하를 탑재해, 한층 더 제어장치로서 미니 컴퓨터를 이용한 WL-5를 제작해, 프로그램 제어에 의해 자동 2켤레 보행 및 방향 전환을 실현했다. 이것은 WABOT-1의 하반신에 이용되었다(1보 45초).

WL-9DR (1980)
준동보행의 실현 :WL-90DR
제어장치를 미니 컴퓨터로부터 l6bit 마이크로컴퓨터로 고쳐 수학 모델의 해석을 용이하게 하기 위한(해) 족저접지점을 3점에서 4점으로 한 WL-9 DR를 제작. 설정 보행 패턴을 이용해 세계에서 처음으로 준동보행을 실현했다(1보 10초).

WL-10R (1983)
면보행의 실현:WL-10, 10R
제어장치를 탑재해, 구조 부재에 CFRP를 채용해, 액츄에이터로서 RSA를 이용한 기계 모델 WL-10호기의 고부 요 축으로 RA와 서보밸브를 이용한 자유도를 더해, 신모델 WL-10 R를 개발했다. 본모델에 의해, 지금까지의 준동직진 보행에 정보행이지만 후퇴, 좌우측 (분)편 보행 한층 더 좌우 회전을 더한 면보행을 실현했다(1보 4.4초).

WL-10RD (1984)
동보행의 실현:WL-10RD
WL-10 R호기의 발목부 및 고부에 토르크 센서를 부가한 기계 모델 WL-10 RD를 개발, 단각지지상에서는 설정 보행 패턴을 이용한 프로그램 제어, 입각 전환상에서는 토르크 피드백에 의해 발목을 유연하게 한 순서 제어를 실시하는 것으로, 세계 최초의 동완전 보행을 실현했다. (1보 1.3초)
근황
휴먼로봇의 메카라는 명성에 맞게, 와세다 대학은 1992년, 정보 공간과 행동 공간을 인간과 공유할 수 있는 로보트의 실현을 목표로 「프로젝트:인조인간」을 개시하였고, 1995년, 인간과의 밀접한 커뮤니케이션을 실현하기 위한 실험용 로봇《Hadaly-1》를 시작. 같은해 NEDO(신 에너지·산업기술 종합 개발 기구)의 제안 공모형·최첨단 분야 연구개발의 연구 프로젝트에 대해, 의료복지 분야에 있어서의 간호나 서비스 분야에 있어서의 인간의 보조를 목표로 한 인간 공존 로봇《Hadaly-2》및 2족 보행 인조인간《WABIAN》(와비안, WAseda BIpedal humANoid)를 개발. 현재도, 인간 공존 로보트의 새로운 개발을 향해 연구를 거듭하고 있다.

출 처
http://www.humanoid.waseda.ac.jp/ [이 게시물은 로보맨님에 의해 2013-09-14 22:26:26 robo_컬럼&탐방에서 이동 됨] [이 게시물은 로보맨님에 의해 2013-09-14 22:48:16 리뷰에서 이동 됨]
댓글목록
등록된 댓글이 없습니다.