꿈의 2족 보행로보트 킷 「KHR-1」철저 리뷰(제1회)
페이지 정보
작성자 로보맨 작성일 09-07-10 16:20 조회 16,238 댓글 0본문


조립하고와 샘플 모션에 의한 동작까지..
트크모가 판매하는 콘도 과학제의 자작 로보트 「KHR-1」
ASIMO나AIBO의 등장에 의해 분위기를 살린 로봇 붐도 , 그 후 약간 침채되었지만, 작년에 영화 「아이, 로봇」이 공개되었고 ROBO-ONE 로봇 대회가 일본 TV에 가끔 등장하는 등 , 다시 부활의 조짐을 보이고 있다. 기술적으로도 순조롭게 진보하고 있어 , 얼마전 혼다가 달리는 일도 가능한 차세대 ASIMO가 발표되었다.
필자도 로봇에 흥미는 있지만, 로봇에 관해서는 완전한 아마추어이며, 2족 보행로봇과 같은 고도의 로봇을 스스로 만드는 기술은 없다. 그러나, 2족 보행로봇은 로봇의 꽃이며 언젠가는 2족 보행로봇을 손에 넣고 싶다고 생각하고 있었다.
그렇게 꿈을 이루어 주는 것이 2004년 여름에 등장한 콘도 과학의 2족 보행로보트 킷「KHR-1」이다. KHR-1은 걷는 것은 물론 전전이나 후전, 회전 등 다양한 동작이 가능한 2족 보행로봇이다. 초심자라도 부담없이 조립할 수 있도록 설계되어 있는 것이 매력이다. 또 KHR-1에서는 PC으로부터 제어를 행하는 것으로 , 오리지날의 동작도 자유롭게 만들 수가 있다.
KHR-1의 판매 가격은126,000엔(세금 포함)이며 부담없이 구입할 수 있는 가격이라고 하는 것은 아니지만, 본격적인 2족 보행로봇 킷으로서는 이것이라도 놀라울 정도 싼 것이다. 예를 들면 2족 보행로봇 배틀 대회 「ROBO-ONE」에 출전하는 로봇의 부품 합계는 싼 것이라도 수십만엔에서 높은 것으로는100만엔을 넘는다.
KHR-1는 초기 재고가 눈 깜짝할 순간에 완매할 정도의 인기를 끌어 벌써 1,000대 이상이 출시되었다고 한다. KHR-1은 콘도 과학의 사이트로부터 구입할 수 있는 것 외에 트크모로봇트 왕국의 넷 숍에서도 취급되고 있다. 아키하바라의 트크모로봇트 왕국에서는 KHR-1을 상시 전시 하고 있어 매장에서의 구입도 가능해서 흥미를 가진 분들은 한 번 방문해 보기바란다.
모션 크리에이션 기능의 탑재에 의해 모션 데이터를 간단하게 작성 가능
KHR-1의 상세한 것에 대하여는 콘도 과학의 사이트를 봐 주셨으면 하지만 , 간단하게 스펙을 소개하면 사이즈는 340×180mm, 중량은 약1.2kg(배터리포함), 전부17의 자유도를 가진다. 자유도는 인간의 관절에 상당한다고 생각하면 좋다. 예를 들면 노트 PC의 액정의 경첩은 1개의 축의 주위 밖에 움직이지 않지만 이 경우의 자유도는 1이 된다. 최근의 휴대폰에서는 2축의 경첩을 탑재해 액정을 겉에도 뒤편에도 할 수 있는 제품이 등장하고 있고, 이 경우 자유도는 2가 된다. 자유도가 많을 수록 복잡하고 유연한 움직임을 실현될 수 있게 된다.
KHR-1의 17자유도의 내역은 목 1, 한쪽 팔이3(양팔로6), 다리가 두다리 10)되고 있다. 덧붙여 KHR-1에 탑재되고 있는 컨트롤 보드「RCB-1」에서는 최대 24개의 서보 모터를 제어할 수 있으므로 24자유도까지 확장 가능하다(4자유도를 추가하는 옵션도 발매되고 있다).
그리고 이러한 2족 보행 로봇에서는 로봇의 움직임을 제어하는 모션 데이터를 만드는 것이 귀찮지만 KHR-1에는 모션크리이션 기능으로 불리는 세계 최초의 기능을 탑재해 단시간에 모션 데이터를 작성할 수 있는 것이 특징이다.
모션크리에이션 기능이란 로봇을 직접손으로 움직여 그 포지션의 데이터를 PC에 입력하는 기능이다. 포지션과 포지션의 사이의 움직임은 자동적으로 보완해 주므로 중간의 포즈를 무슨 컷이나 지정해 나가는 것만으로 순조로운 모션 데이터를 작성할 수 있다.
드라이버 1개로 조립하고 가능하지만 나사 고정 갯수는 100개를 넘는다
이와 같이 KHR-1는 매우 고기능의 로봇이며 옵션에 의해 한층 더 기능을 확장해 나가는 것이 가능하다. 1회의 기사에서는 매우 소개 다 할 수 없기 때문에 몇차례에 걸쳐서 채택 하고 싶다.
제1회가 되는 이번은 킷이 조립하고 순서와 미리 제공되고 있는 샘플 모션에 의한 동작을 소개하자.
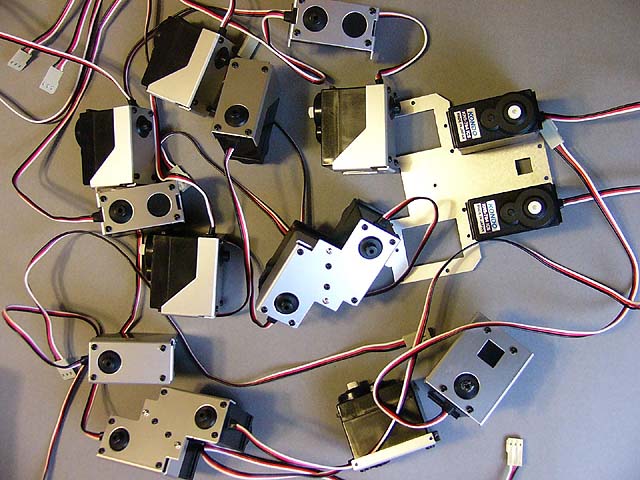
KHR-1의 패키지에는 다양한 파츠가 들어가 있지만 안에서도 중요한 것이 17개의 서보 모터와 프레임 브라킷류이다. 서보 모터는 17개 전부 같지만, 프레임은 몇개의 종류가 있으므로, 잘못하지 않게 하고 싶다.
덧붙여 인쇄물은 B5용지 1매의 킷 가이던스만으로 조립하고 메뉴얼이나 소프트웨어 메뉴얼은 부속의 것은 CD-ROM에 PDF형식에서 수록되고 있다. KHR-1을 움직이려면 Windows 2000/XP가 동작하는 PC도 필요하다.
KHR-1의 패키지

KHR-1의 부품들. 서보모터 17개 포함

나사와 코드종류

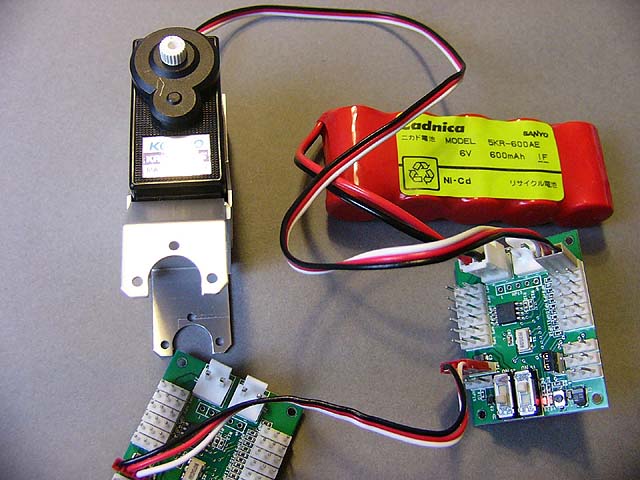
니카드 밧데리와 충전기. 풀 충전시 12시간 소요
조립 메뉴얼과 소프트웨어 메뉴얼은 PDF형식으로 CD-ROM에 수록

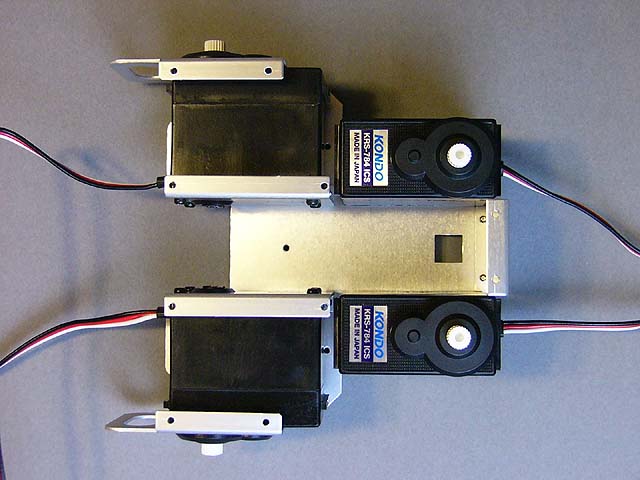
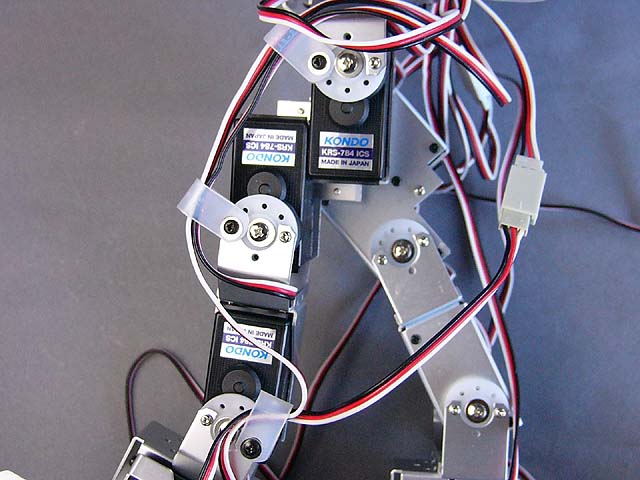
KHR-1에 사용된 콘도 과학사의 서보 모터 「KRS-784ICS」

서보 모터와 CF카드의 사이즈 비교.
PDF형식의 조립 메뉴얼에는 이미지로 표현되어 있으므로 메뉴얼에 따라 천천히 조립해 가면 초심자라도 문제 없게 조립할 수 있을 것이다 (덧붙여 메뉴얼에 일부 오기를 찾아냈다. P.18의 서보 암의 설치에 필요한 나사의 합계 갯수는 6이 아니고 16이 올바르다고 생각된다. 그리고 P.32의 서보의 접속의 설명으로 10cm의 연장 케이블을 사용하는 서보는 CH3, 9, 15, 21의 4개가 되고 있지만 이것은 CH3, 9, 15, 16, 21, 22의6개가 올바르다고 생각된다. 킷에도 10cm의 연장 케이블이 6개 포함되어 있다).
다만, 우측과 좌측으로 미묘하게 다른 부품이 있으므로 잘못하지 않게 주의해야한다. (필자는 도중에 1회 잘못해 버렸다). 기본적으로는 플러스 드라이버가 한개 있으면 조립 가능하다. (단, 서보 모터의 쑥 내민 부분을 잘라낼 필요가 있으므로 니퍼가 있으면 편리하다.)
조립하는 순서는
1. 서보 모터의 케이스 나사를 벗는다
2. 서보 모터를 브랙킷에 단다
3. 보디를 조립한다
4. 팔이나 다리등을 부품 단위로 조립한다
5. 서보 혼을 단다.
6. 팔의 조립
7. 다리의 조립
8. 기판의 설정과 부착
9. 전체가 조립하고와 동작 확인
10. 배선을 묶는다
11. 기판 커버의 컷과 매단다.
이 5번째로부터 9번째 의 항목에서는 서보 모터에 흐르게 해 초기 상태의 정지 위치를 확인(위치 내)하면서 작업을 행할 필요가 있으므로 조립을 시작하기 전에 부속의 니카드 밧데리를 충전해 두는 것이 좋다. (부속의 충전기에서는 풀 충전에 약 12시간이 걸리는 것이 단점이다).
KHR-1의 조립은 기본적으로는 나사 고정 작업 뿐하지만 나사 고정이 필요한 곳의 갯수는 100개소를 넘으므로 조립에는 그 나름대로 시간이 걸린다. 단번에 조립하려고 하지 않고 도중에 휴식하면서 천천히 조립하면 좋을 것이다. 덧붙여 나사나 washer는 조금 넉넉하게 들어가 있으므로 한두개 없어져도 괜찮다.
서보 모터와 작은 알루미늄제 부품을 조합해 가는 것으로 처음은 매우 로봇으로 보이지 않았던 파츠가 조금씩 로보트의 형태가 되어 가는 것을 보는 것은 꽤 즐겁다. 무심코 , 시간도 잊어버리고 열중해 버렸다.
필자의 경우 9번째 의 항목까지 끝나 동작 확인을 하기까지 걸린 시간은 6시간 정도 걸렸다. 다만 , 필자는 도중에 사진을 찍으면서 만들고 있었으므로 만들기에 전념하면 좀 더 짧은 시간에 완료할 것이다. 조립하는 모습에 대해서는 사진과 캡션을 참고로 했으면 좋겠다.

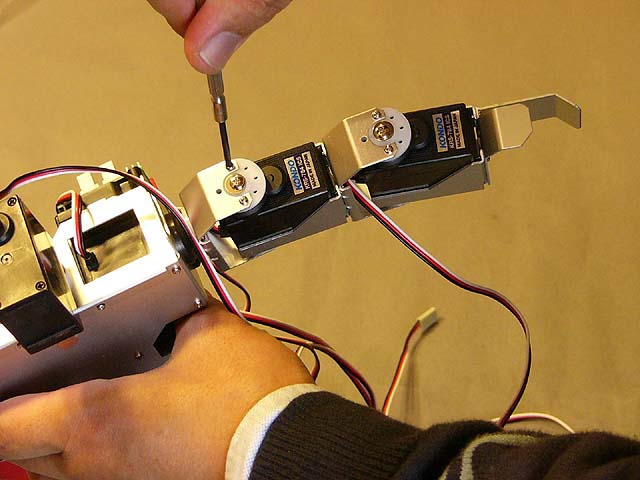
서보모터의 케이스 나사를 떼어낸다.

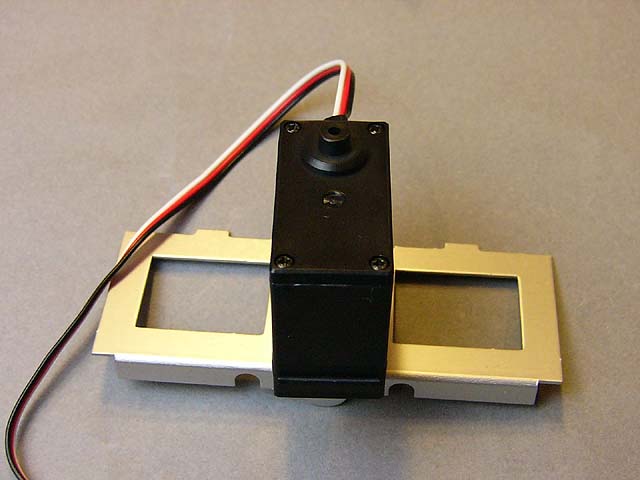
떼어낸 케이스 나사를 이용해 브랙킷을 서보 모터에 고정
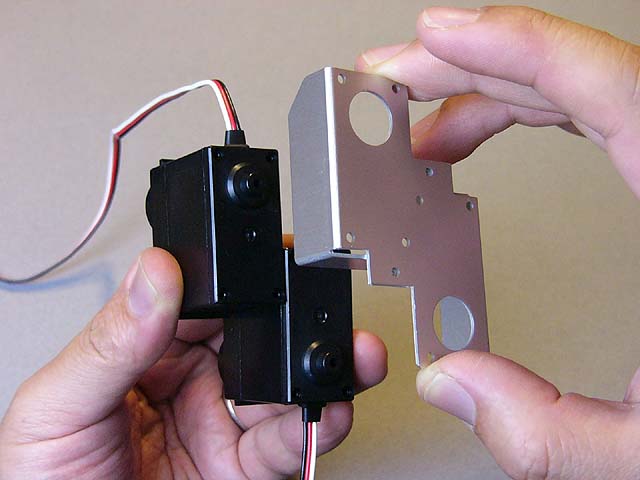
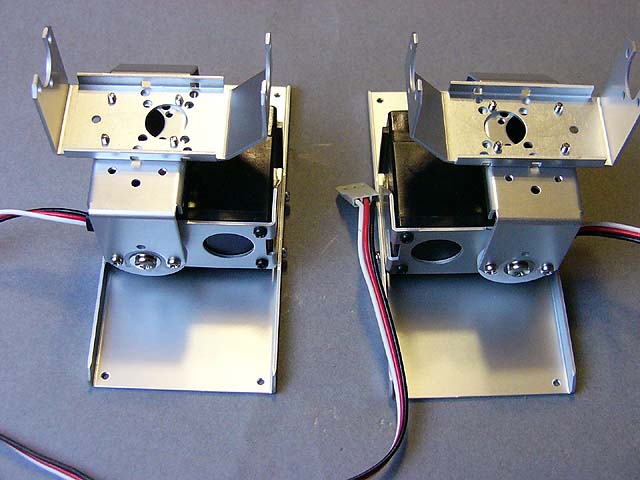
다리가 되는 브랙킷에는 2개의 서보 모터를 고정
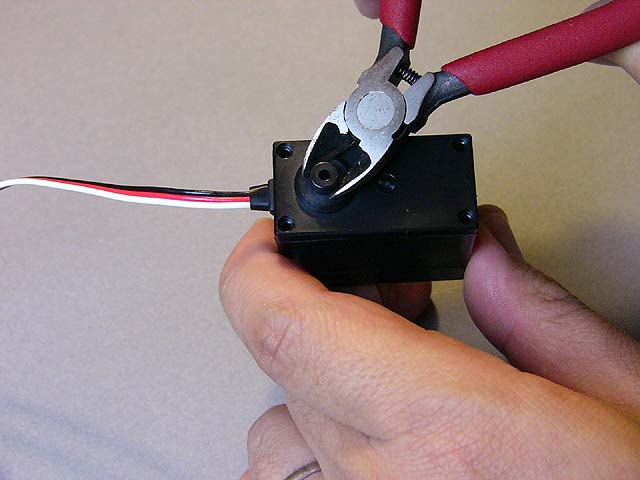
17개의 서보 모터 중 2개는 쑥 내민 것 부분을 잘라낸다.

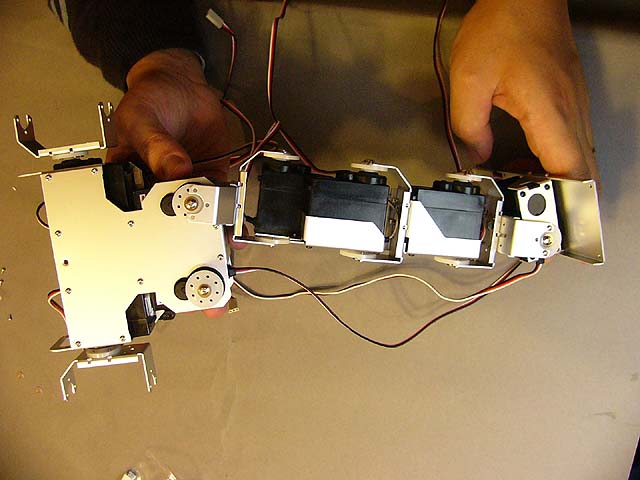
서보 모터를 브랙킷에 모두 달았는데. 아직 로봇다운 모양은 아니다.
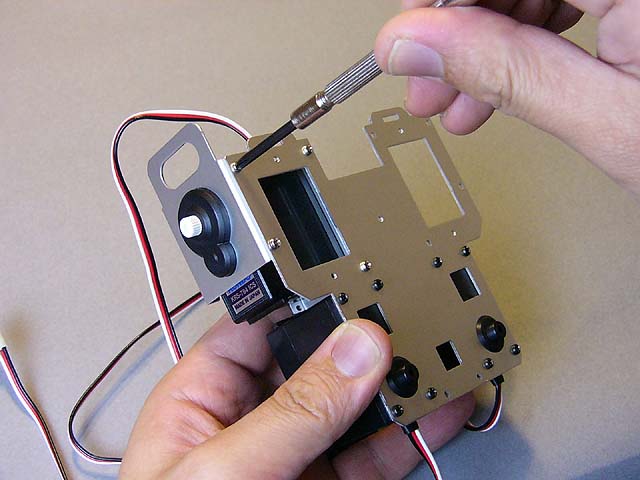
보디 프레임에 서보모터를 설치
보디프레임에는 전부 4개의 서보모터가 설치
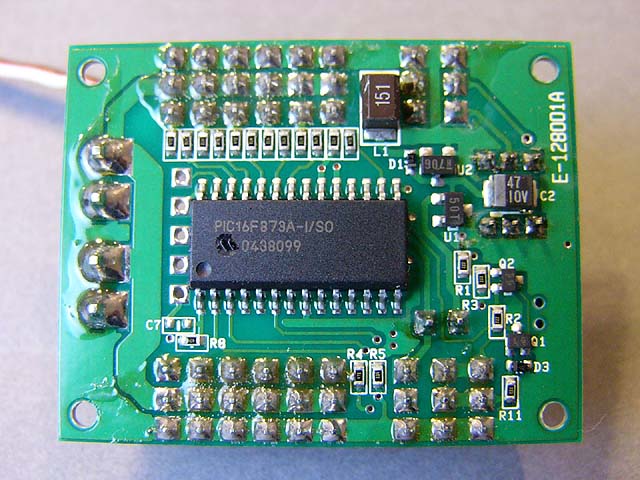
컨트롤 보드 「RCB-1」의 뒷면. PIC마이크로컴퓨터 「PIC16F873A」이 탑재
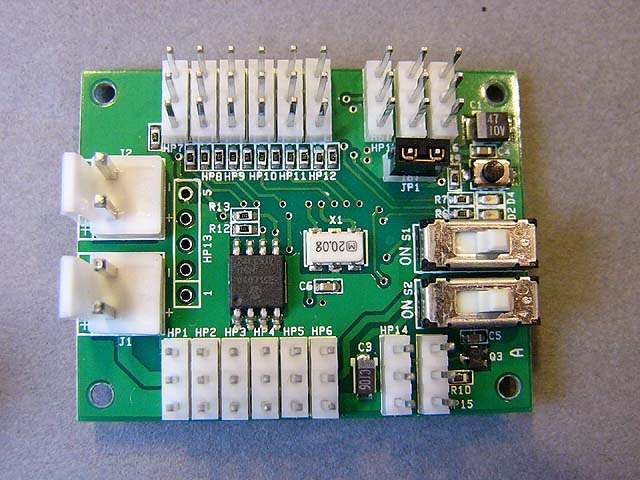
컨트롤 보드 「RCB-1」의 앞면. 1매로 12개의 써보 모터를 제어 가능
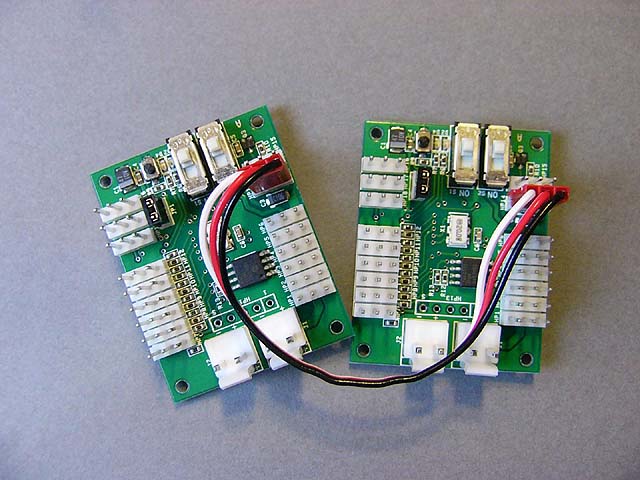
KHR-1에는 RCB-1이 2매 부속되어 있으므로 합계 24개의 서보 모터를 제어할 수 있다.
여기서부터는 서보 모터에 실제로 전류를 흐르게 한다.


흰 플라스틱 혼을 부착한 서보모터
좌우의 발바닥이 되는 부분을 조립
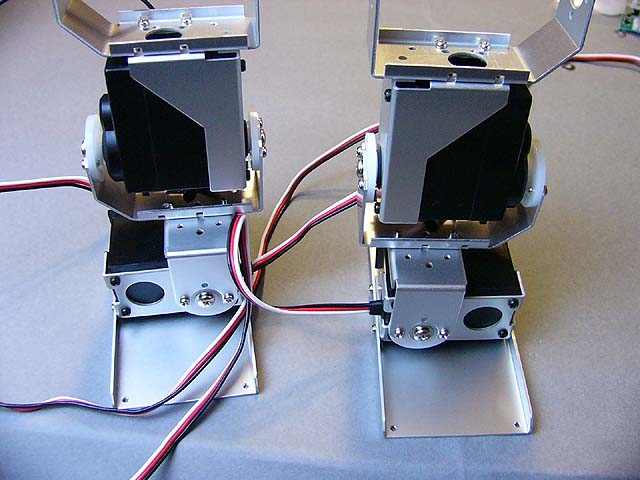
좌우 다리아래부분
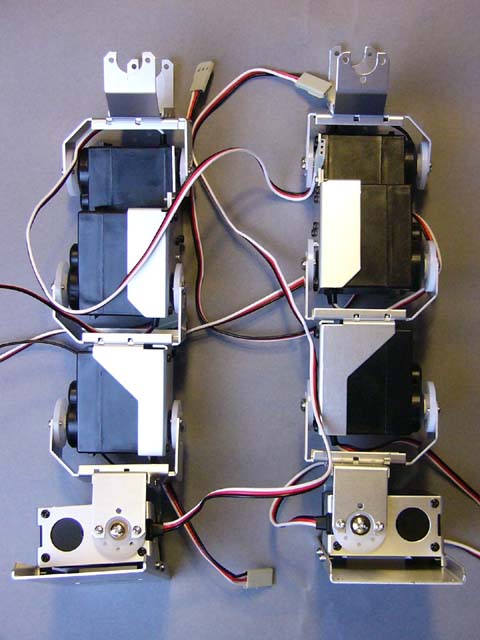
양다리완성
컨트롤 보드 고정
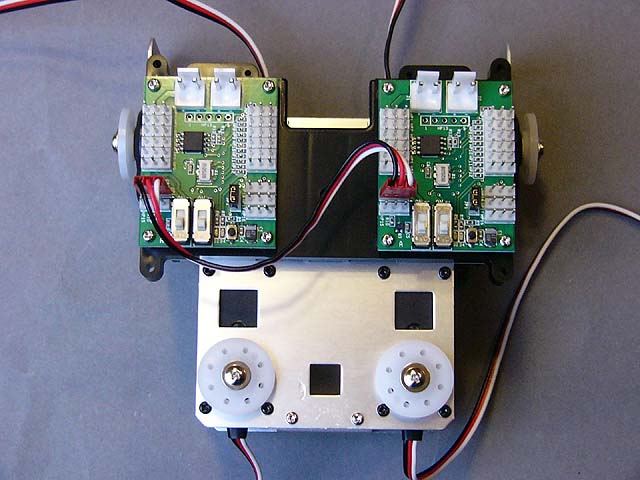
2개의 컨트롤 보드 부착
서보모터가 그대로 머리가 되는 머리부분
보디부분에 완성된 다리 부착
보디 부분에 팔 부착
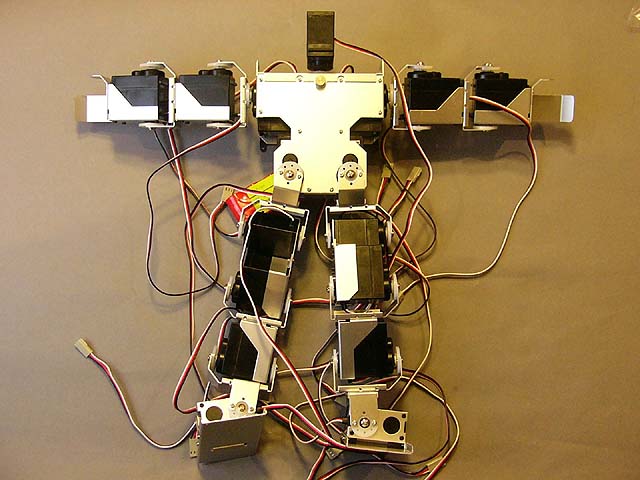
보디 부분 완성
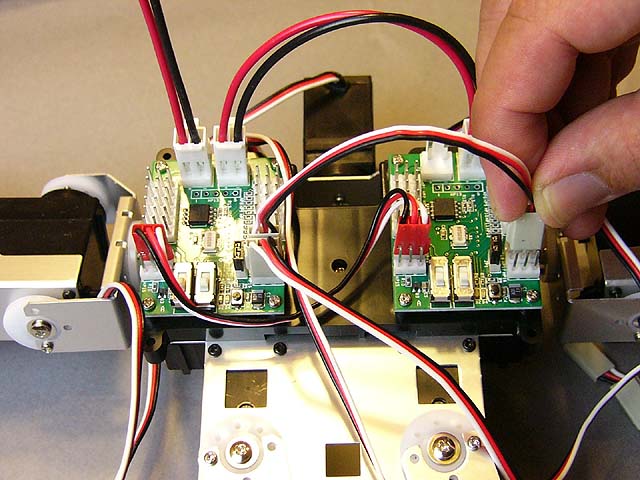
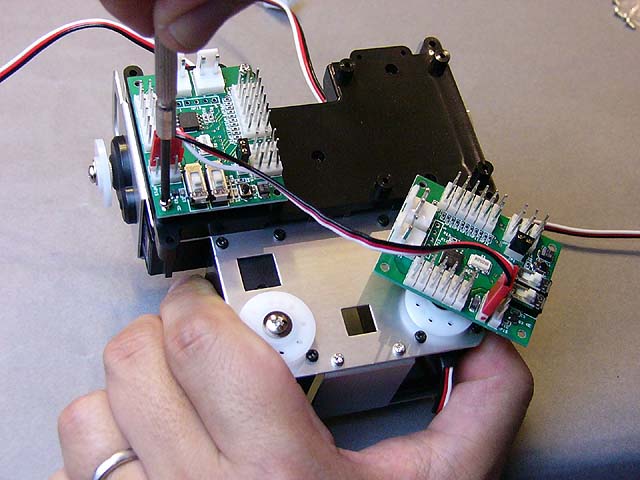
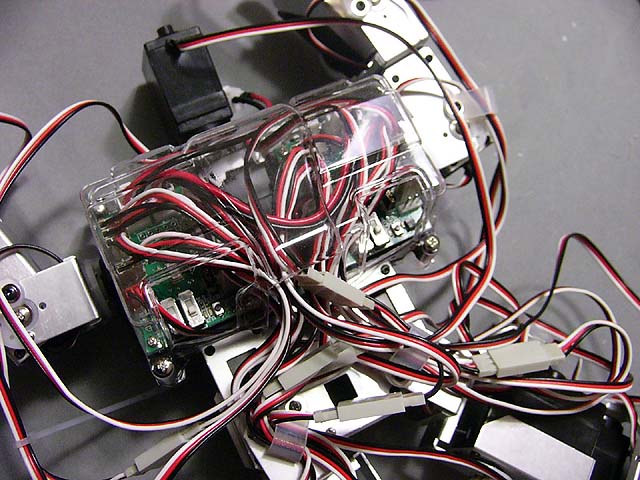
코드를 컨트롤 보드에 접속한다. 연결을 잘못하면 정상적인 작동을 하지 않는다.
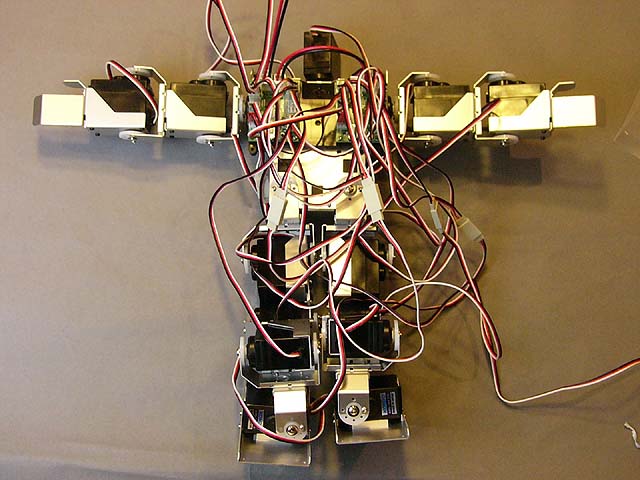
코드의 접속이 완료. 이대로는 코드가 얽혀 버리므로 묶을 필요가 있다.
여기까지 조립이 완료하면 PC에 모션 제어용 소프트인 「Heart To Heart」를 인스톨 하고, PC와 KHR-1를 접속한다. 부속 CD-ROM에 수록되고 있던 것은 Ver1.1 이지만, 버그 수정된 Ver1.2가 콘도 과학의 사이트에서 공개되고 있으므로 그 쪽을 이용했다.
KHR-1은 PC와의 인터페이스로서 RS-232C(시리얼)을 이용하지만 최근의 PC (특히 노트북)에서는 유선 인터페이스인 RS-232C을 장비 하고 있지 않는 것도 많다. 그 경우는 USB- RS-232C 변환 케이블을 사용하면 좋다. 필자는 산와 서플라이의 USB-RS-232C 변환 케이블 「USB-CVRS9」을 이용했다.
HeartToHeart를 사용해(이 소프트의 사용법에 대해서는 다음번 자세하게 소개할 것이다.) 17개의 서보 모터가 모두 올바르게 동작하는 것을 확인하면 트림 기능으로 서보 모터의 위치의 미세 조정을 행한다. 이 미세 조정은 2족 보행등의 움직임을 실현하기위한 중요한 포인트이다.
조정이 종료하면 여분의 코드를 묶어 기판 케이스로 달면 조립하고는 완료다. 코드는 잘 묶지 않으면 프레임 등에 얽혀 서보 모터가 정상적으로 움직이지 못하게 되는 것 있다. 덧붙여 기판 케이스에는 여분의 부분이 있어 커터등으로 잘라내지 않으면 안 되겠지만 이것이 상당히 수고가 걸리는 작업이었다. 서보 모터 번호 씰이나 얼굴 씰이 부속되어 있으므로 기호에 응해 붙이면 좋을 것이다. 특히 서보 모터 번호 씰을 붙여 두면 모션 작성시에 편리하다.
부속의 나일론 클립이나 스트랩으로 코드를 묶는다.

기판을 커버하는 기판 케이스. 컷터로 잘 다듬는다.
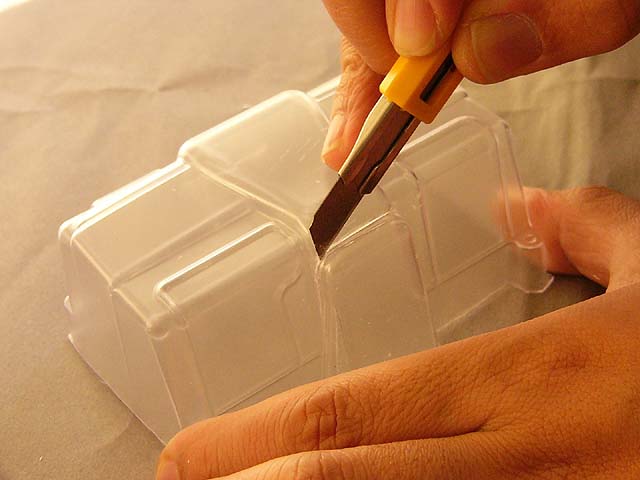
기판 케이스를 조금씩 잘라낸다.

기판케이스
기판 케이스를 달았는데. 이것으로 넘어져도 기판을 보호할 수가 있다.
서보 모터 번호 씰이나 얼굴 씰이 인쇄되어 있다.
기준 포지션의 설정이 중요
KHR-1 그리고 2족 보행을 시작으로 하는 다양한 움직임을 행하게 하려면 기준 포지션으로 불리는 기본 자세가 중요하다.
기본 포지션은 직립 한 상태의 포즈로 모든 동작의 기본이 된다. KHR-1의 전원을 넣으면 자동적으로 기본 포지션으로 이행해 모든 동작이 거기로부터 시작되므로 기준 포지션이 제대로 설정되어 있지 않으면 2족 보행을 시키려고 생각해도 잘 되지 않다. 부속 CD-ROM에 수록되고 있는 기분 포지션의 샘플 데이터를 사용하면 설정도 간단하다.
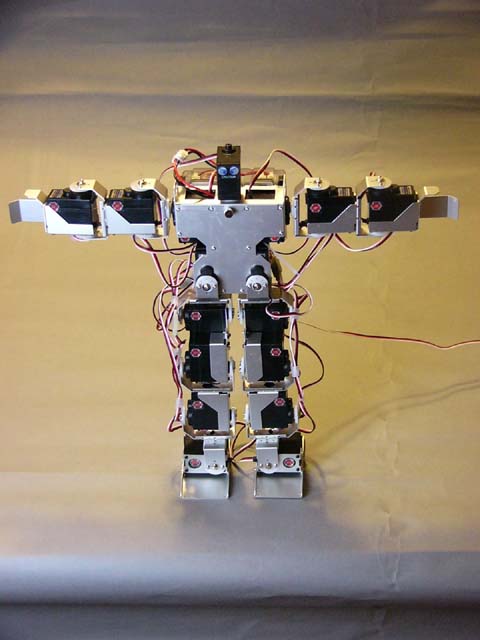
기준 포지션을 설정하기 전의 초기 상태에서는 손을 좌우에 넓히고 있다.
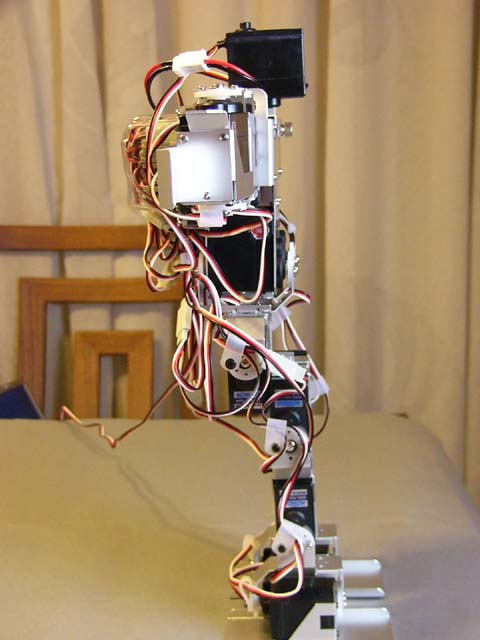
초기 상태를 옆으로부터 보았을때 중심이 꽤 뒤로 치우쳐 있기 때문에 , 이대로는 넘어지기 쉽다.
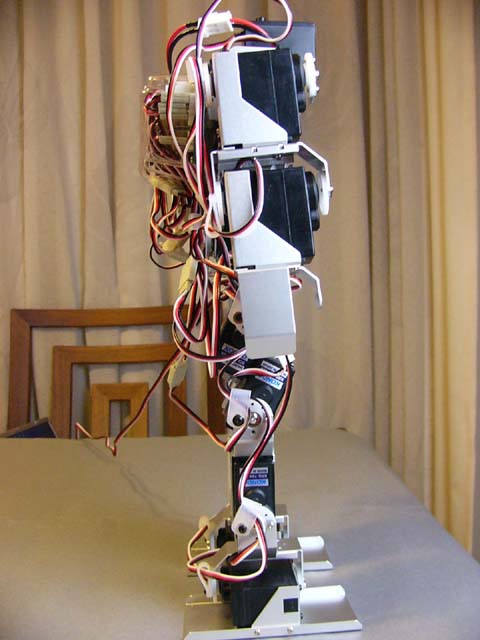
기준 포지션을 옆으로부터 보았는데 중심이 중앙에 있어 밸런스가 좋다.
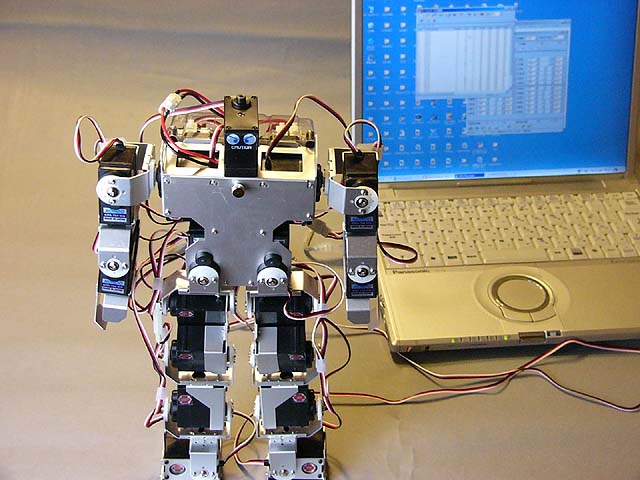
USB-RS-232C 변환 케이블을 이용 노트북과 접속
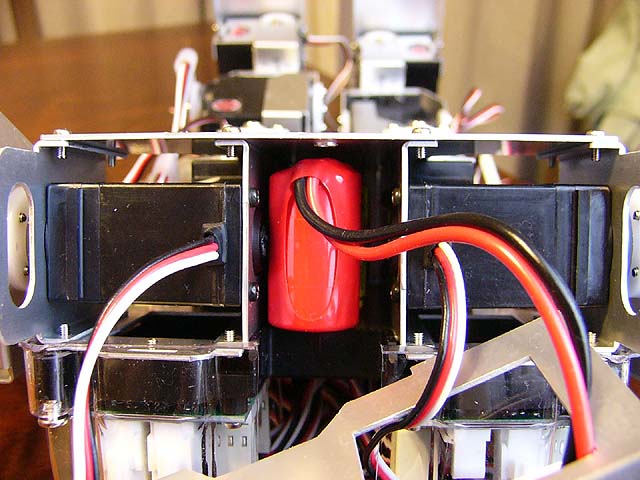
배터리는 동체 중앙 부분에 격납된다.
2족 보행의 밸런스는 꽤 엄격
기준 포지션의 설정이 끝났으므로 부속 CD-ROM에 수록되고 있는 샘플 모션을 이용해 , 다양한 동작에 도전해 보았다. 부속 CD-ROM에는 2족 보행에 의한 전진과 후퇴, 좌우로의 사이드 스텝, 엎드리고 일어서는 동작, 덤블링해서 일어서는 동작 등 총 6종류의 샘플 모션이 수록되고 있다. 그리고 콘도 과학의 사이트에서는 팔굽혀펴기, 선회, 전전, 후진, 구보, 측전 등의 추가 샘플 모션을 다운로드할 수 다.
우선은 부속 CD-ROM에 수록되고 있는 2족 보행에 의한 전진 모션을 KHR-1에 전송해 움직여 보았지만 3보 못가서 오른쪽으로 넘어져 버렸다. 몇번인가 시험했지만 반드시 3보에서 넘어져 버린다. 반드시 오른쪽으로 넘어지므로 좌우의 밸런스가 차이가 나는 것 같다. 그래서 한번 더 기준 포지션을 조정했는데 끝까지 넘어지지 않고 진행될 수가 있었다.
그리고 , 마루의 재질의 영향도 큰 것 같다. 너무 단단해서 반들반들이라고 미끄러져 버리고 너무 부드러워도 잘 걸을 수 없다. 게다가 같은 모션 데이터를 사용해도 도중에 넘어져 버리는 경우도 있다.
예상했던것보다 2족 보행의 밸런스는 엄격한 것 같다. 혼다의 ASIMO나 소니의 QRIO에서는 거뜬히 2족 보행을 실현하고 있는 것처럼 보이지만 2족 보행이 얼마나 어려울것인가 라고 하는 일을 직접 채험할 수 있었다. 이러한 일을 실감할 수 있는 것도 실제로 2족 보행 로봇을 손에 넣었기 때문이다.
덧붙여 KHR-1가 넘어지기 쉬운 것은 모두 센서를 장비 하고 있지 않기 때문이다. ASIMO나 QRIO에서는 가속도 센서나 쟈이로 센서를 탑재해 넘어지지 않게 피드백 제어가 행해지고 있다.
전진 이외에도 후퇴나 왼쪽에의 사이드 스텝, 엎드렸다 일어남 등의 샘플 모션을 시험해 보았으므로 동영상을 보면 좋겠다. 이 동영상을 보면 알지만 꽤 위태로운 장면이 많다. 아직 완전하게 좌우의 밸런스가 갖추어져 있는 것은 아닌 것 같다.
KHR-1(은)는 누구라도 조립할 수 있는 본격적인 2족 보행로봇이라고는 하지만, 항상 2족 보행이 가능이라고 하는 것은 아니다. 2족 보행은 밸런스가 매우 엄격해서 제대로 조정을 행할 필요가 있다. 그러나 , 그 시행 착오의 과정도 실로 즐겁다.
정확히 오늘은 크리스마스 이브다. KHR-1는 본격적인 2족 보행로봇 킷이며 어린이용의 장난감이라고 하는 것은 아니지만, 자녀분이 로봇에게 흥미를 가지고 있다면, 과감히 선물 해 주는 것은 어떻까? 함께 조립해 주면 부모의 인기가 훨씬 오를 것이다.
다음번은 스스로 오리지날의 모션을 만드는 방법에 대해 소개할 예정이다.
동영상 1
동영상 2
동영상 3
동영상 4
동영상 5
동영상 6
동영상 7
□ 트크모로봇트 왕국의 홈 페이지
http://www.rakuten.co.jp/tsukumo/
□ 관련 기사
【12월16일】혼다 , 기동성이 향상한“달린다”ASIMO를 공개
http://pc.watch.impress.co.jp/docs/2004/1216/honda.htm
출처 : http://pc.watch.impress.co.jp/docs/2004/1224/digital011.htm
- Copyrights ⓒ 로보맨 & roboman.co.kr, 무단 전재 및 재배포 금지 -
[이 게시물은 로보맨님에 의해 2013-09-14 23:21:50 묻고답하기에서 이동 됨]
[이 게시물은 로보맨님에 의해 2013-09-14 23:42:26 리뷰에서 복사 됨]댓글목록 0
등록된 댓글이 없습니다.