KHR-1HV
페이지 정보
작성자 라퓨타 로봇왕국 댓글 0건 조회 28,368회 작성일 09-10-08 13:22본문
111111111111111111111111111111
|
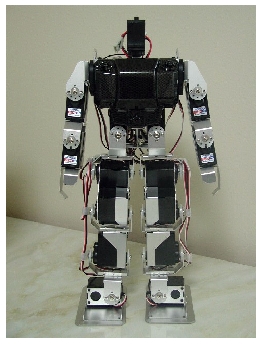
KHR-1HV
지금까지,영화나 애니메이션의 세계에서나 보아 왔던 상상의 2족 보행 인간형 로봇이 ,당신의 손안으로 찾아 온다!
KONDO이기 때문에 실현할 수 있었다,저가격을 실현하기 위해 설계되고 ,기본형이 제5회RoboOne J 클래스에서 우승한 것으로서 성능이 증명, 공개되었다. 동영상에서의 경쾌한 움직임은 ,양산기종이라고는 생각되지 않는 가능성을 느끼게 한다. 구입 후 조립해야합니다. 매뉴얼은 영어입니다 |
||
KHR-1HV는 배송까지 2주 소요됩니다.
KHR-1HV spec.
|
size |
377×179 mm |
|
weight |
1.51kg (batt. 탑재 시) |
|
관절자유도 |
총 19자유도 (다리 12, 팔 6, 머리 1) |
|
control board |
RCB-3HV |
|
servomotor |
KRS-788HV × 17, KRS-4024S HV × 2 |
|
외부연결 |
RS232C (PC용), 8ch (무선 조종기 용) |
|
PC사양 |
구성품 | |
|
OS |
MS Windows XP or 2K |
전용충전기 |
|
CPU |
P3 이상 |
Batt : NiCd 10.8V(800mAh) |
|
Memory |
128M 이상 |
|
|
I/O |
serial port 1 |
CD-ROM, HeartToHeart 1(로봇 동작용 GUI) |
servomotor spec.
|
model |
KRS-788 |
|
size |
45×35×21 mm |
|
weight |
47.5g |
|
torque |
10kg.cm |
|
speed |
0.14s/60° |
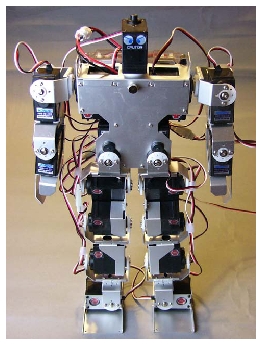
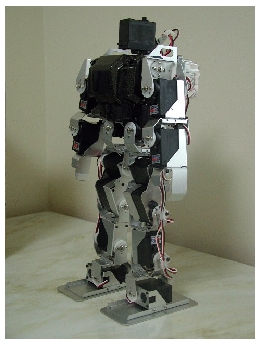
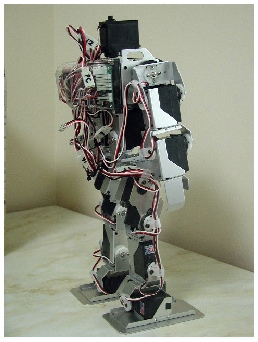
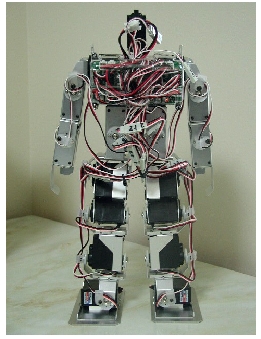
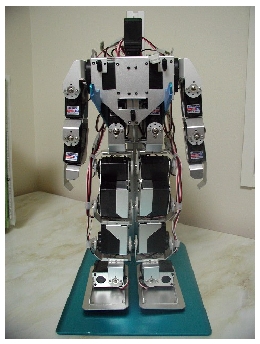
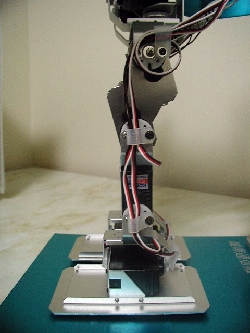
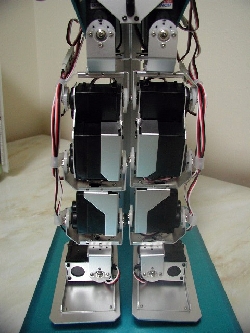

KHR-1HV

다리 전체를 회전시켜 주는 서보모터가 허리 밑에 2개 추가되어 기존 KHR-1보다 자연스러운 움직임이 가능하게 되었습니다.
| 간단하게 할 수 있는 조립 | |||||
 |
KHR-1HV는 동작시키기 위해 필요한 부품을 전부 포함한 키트이기 때문에 ,드라이버 등의 일반적인 공구와 윈도우즈가 있는 개인용 컴퓨터가 있으면,그밖에 갖출 것은 없다. 조립 자체도 특수한 공구는 필요없기 때문에 생각보다 간단하다. |
||||
| 부품수는 비스 류를 포함하면 ,200점을 초과하지만 초보자도 몇 시간 안에 완성시킬 수 있다.(※) | |||||
 |
|||||
| KHR-1HV는 19 자유도를 갖는다.자유도란,인간의 관절에 해당하기 때문에 자유도가 많으면 보다 사람에 가까운 움직임을 구현 할 수 있는 것을 의미한다.그 관절 그 자체라고 말할 수 있는 액추에이터에는 새롭게 개발된 로봇 전용 서보모터 KRS-788HV를 탑재한다. 많은 로봇 빌더들이 각광하는 KRS-2350ICS RedVersion과 기어 구성이나 케이스 어셈블리는 다르지만 전기적인 사양은 RedVersion의 기능을 풀 서포트하고 있다. |
|||||
|
※조립시간은 일반적인 것을 말하고,이것을 보증하지는 않습니다. | |||||
|
로봇의 사령탑 컨트롤러 RCB-1 | |
|
|
서보모터 KRS-784ICS가 관절이라면 컨트롤 보드 RCB-1은 두뇌 즉, 사령탑이라고 할 수 있다.KHR-1은 컨트롤 보드 RCB-1 2 대를 싱크로나이즈시키고 17개의 서보모터를 컨트롤하여 동작된다. 또한,1장의 보드에서 12 대의 서보,2장으로는 24 대의 서보의 접속이 가능하기 때문에 장래의 옵션 부분이나 자작 개조에 의한 서보의 추가도 가능하다. RCB-1은 컴퓨터에 접속하여 미리 설정한 데이터(모션)의 재생이나 자신의 메모리에 기록된 데이터에 근거한 오토 런등을 행한 것이 가능하다. 또한 소형 경량이기 때문에 보드 2장의 무게는 불과 약 24g! 서보모터의 반 이하이어서 경쾌한 움직임에 한몫을 한다. |
|
●주된 기능·설계 Spec. |
|
|
■ 크기··············45 × 35(mm) ■ 무게··············12g(보드 1 매) ■ 컨트롤 가능 서보 수·····12 개(2 매의 보드 링크에서 24 개 제어 가능) ■ 적정 전압·····DC6V(승압 회로에 의하고,안정 동작이 가능.) | |
|
콘트롤러의 심장부인 CPU에 있어서의 가장 조심할 것은 전원 전압의 변동.그러나,별도 배터리를 탑재하는 것은 중량면으로는 큰 마이너스 요소가 되고 만다.RCB-1은 부스터7 동등의 회로를 내장으로 하는 것으로 이 큰 문제를 해결하고 있다. | |
|
| |
|
004.06.26 RCB-1 커맨드 리퍼런스가 여기에 공개되어 있습니다. | |


| 모션 작성의 혁명! 모션캡쳐(교시) 기능 | ||||||
 |
RedVersion의 기능을 풀 서포트한 서보모터 KRS-784ICS와 RCB-1의 조합을 이용하여 실현한 혁신적인 모션 작성 방법. 로봇을 동작시키는 경우에 그 동작을 각 서보의 동작 데이터로서 기록한 필요가 있고, 종래의 수치 입력에 의한 방법으로는 많은 시간을 소비한 필요가 있었다. KHR-1은 모션캡쳐 기능을 사용하여 단시간에 모션 작성을 행한 것이 가능하다.모션캡쳐 모드에 들어가면 ,로봇의 각 관절은 프리한 상태가 되고 이 상태에서 생각한 위치에 모양을 정하고,그 데이터를 컴퓨터의 소프트웨어로 캡쳐. 이런 식으로 계속 캡쳐를 반복하면 복잡한 모양을 포함한 모션도 편안하게 작성한 것이 가능하다. 대강의 모션은 캡쳐를 이용하고 섬세한 수치는 마우스로 조정한다. |
|||||
| 아래 사진은 캡쳐를 이용하여 작성한 모션의 연속 사진을 보여준다. | ||||||
 | ||||||
|
서포트 소프트웨어「HeartToHeartVer1.0」 | |
 |
제품에 포함된 CD에는 조립 설명서등과 함계 모션 작성 소프트웨어「HeartToHeartVer1.x」가 포함되어 있다.이 소프트웨어를 사용하여 모션캡쳐 기능에 의한 모션 만들기가 가능하다. |
|
■ 소프트웨어 사용 환경 | |
|
● OS: MS Windows 2000, XP ● 필요 메모리:128M 이상 ● CPU:Pentium3 이상 ● 통신 포트:232C 포트를 사용. ※USB 변환에 의한 232C 포트의 경우동작하지 않는 경우가 있음 ● CD-ROM 드라이브 필수 | |
|
CD-ROM에 수록되고 있는 매뉴얼에 이 소프트웨어의 사용 방법에 관하여 상세하게 설명해 있기 때문에 설명서대로 진행하면 모션의 만들기의 기본적인 방법을 습득 할 수 있다. 또,기본적인 모션으로서 ,전진,후진등의 샘플도 수록되고 있기 때문에 조립 후 바로 시험해 볼 수 있다. | |
|
이곳에서 추가의 샘플 모션을 공개 중! | |
|
KHR-1 Support | ||
|
서보모터의 케이스 비스를 고정할 때의 주의점과 대책 | ||
|
|
어깨의 부분의 서보를 4024로 개조 예입니다.HV 전환을 적용한 후의 개조입니다 | |
|
|
서보가 부들부들 떨리는 헌팅으로 불리는 증상에 대한 대처 방법의 설명 파일입니다 | |
|
KHR-1 매뉴얼 다운로드 | ||
|
|
KHR-1 본체의 조립 매뉴얼 최신판입니다 | |
|
소프트웨어 다운로드 | ||
|
|
KHR-1의 컨트롤 보드용 소프트웨어 HeartToHeart 최신판입니다. ID 설정이 아래와 같은 설정 소프트웨어를 사용하도록 변경되고 있습니다. | |
|
|
||
|
|
RCB-1의 ID 설정용의 소프트웨어입니다. 보통 사용한 필요는 없지만 ID 설정이 필요한 경우에 사용합니다 | |
|
|
||
|
|
센서 컨트롤 보드「RSC-1」설정 소프트웨어입니다.RCB-1에 아날로그 전압을 출력한 센서를 접속하고,센서의 값에 의한 모션의 재생을 가능하게 합니다. | |
|
|
||
|
|
무선 컨트롤 유닛용의 소프트웨어,RCB 코맨더의 최신 정보 판. ● 바뀐 점 설정 파일의 보존과 읽기에 대응. 화면상에서 설정한, 버튼 배치 등을 여러개 보존해 두는 것이 가능합니다 | |
|
|
||
|
2005년 3월 8일 | ||
|
|
RCB-1 커맨드 래퍼런스의 수정 판입니다. ID 읽을 때 커맨드의 정정 및 그 밖의 표기의 오류를 수정하고 있습니다. | |
|
2005년 1월 6일 | ||
|
|
지금까지 문의 주시고 있던 내용 중 특히 많았던 2점에 관하여 FAQ를 작성했습니다. ● 1개의 서보 컨트롤로 2개의 서보가 움직인다다. ● 상반신,또는 하반신의 한 쪽밖에 서보가 동작하지 않는다. | |
|
2004년 11월 25일 | ||
|
|
무선 컨트롤 유닛에 부속하고 있는 케이블의 일부에 관하여이상이 보고되고 있습니다.해당되는 제품을 가지신 고객은 PDF 파일을 보십시오. 【이상 내용】 케이블의 일부에 다른 배선이 혼입되고 있을 가능성이 있습니다. 이것때문에 전혀 동작하지 않을 수는 없습니다. 조건에 따라 동작에 이상이 발생한 경우는 있습니다. | |
|
2004년 11월 4일 | ||
|
|
RCB-1용 모션 소프트웨어의 최신 정보 판입니다. 몇 개의 버그 픽스를 행하고 있습니다. 기능의 추가는 있지 않으시기 때문에 매뉴얼에 관해서는Ver1.1을 사용해 주십시오. 파일은 자동실행 압축 파일입니다.다운로드후 실행한 것으로 압축이 풀립니다. | |
|
2004년 11월 4일 | ||
|
|
모션 재생 지원소프트 웨어 RCB 코맨더입니다.
무선 유닛의 사용시에는 물론 Robo-One JClass의 유선에 의한 접속에서도 사용하실 수 있습니다 | |
|
2004년 7월 17일 | ||
|
|
무선·유선용으로서 사용할 수 있는 소프트웨어 RCB 코맨더의 조작 매뉴얼입니다 | |
|
2004년 7월 17일 | ||
|
|
단품이라도 출하하고 있는 KHR-1의 표준 컨트롤 보드 RCB-1의 제어용 커맨드 리퍼런스의 매뉴얼입니다. RCB-1의 단품 출하분에도 포함하고 있지만 그 수정 최신판입니다. 일부 표기 및 기재된 오류를 정정하고 있습니다. | |
|
2004년 6월 26일 | ||
|
추가 샘플 모션 다운로드 | ||
|
KHR-1의 추가의 샘플 모션 데이터를 다운로드할 수 있습니다.파일 포맷은 WMV입니다 | ||
|
※KONDO는 데이터를 사용된 결과에 대해서는 책임을 지지 않습니다.모션에 따라 기체나 서보에 부담이 큰 경우도 있으시기 때문에 주의하십시오. 무리한 기동은 서보의 수명을 크게 단축시킵니다. | ||
|
|
공개 요청이 많았던 옆구르기의 무비와 데이터입니다.
서보와 프레임에의 부담이 매우 크기 때문에 주의하십시오.
특히, 왼쪽의 어깨는 혹사 당합니다.
약간의 밸런스로 넘어지거나 일어날 수 없거나 합니다만, 팁이 한가지 있습니다.
왼팔의 서보 한 개 부분에 알루미늄의 판을 붙이는 것으로, 팔이 접지 했을 때의 덜컥거림을 줄여 기체가 수평이 되듯이 하고 있습니다. 왼쪽의 사진에서는, 알기 쉽게, KRS-8044 RED의 명판알루미늄 플레이트를 붙이고 있습니다.
또, 전지 잔량이 얼마 없어도 잘 되지 않습니다.. | |
|
|
 | |
|
|
옵션인 발바닥(L)을 장착한 걷기 모션입니다. 노멀의 다리로는 쓰러질 때가 많다고 생각합니다. 또 이 모션은 바닥의 재질이나 상태에 따라 수행하기 어려울 때도 있습니다. | |
|
|
||
|
|
뒤로 구르기의 모션입니다.역시,서보나 프레임에 부담이 커지기 때문에 주의하십시오. | |
|
|
||
|
|
대담한 기술인 앞 구르기의 모션입니다.서보나 프레임에 부담은 큰 모션이기 때문에 주의가 필요합니다. | |
|
|
||
|
|
다리의 회전축을 갖지 않는 KHR-1로 선회를 행하기 위한 샘플 모션입니다 | |
|
|
||
|
|
KHR-1의 트레이닝 모션.팔굽혀펴기(푸샵)입니다. | |
|
|
||
|
|
제품 CD에 수록되고 있는 걷기는 안정되고 있지만 비교적 천천히 한 동작입니다.홈 포지션등이 정확하지 않으면 이 데이터만으로는 빨리 걸을 수 없습니다. 필요에 따라서 수정 후 사용해 주십시오. | |
|
|
||
|
※이 페이지의 내용은 예고 없이 변경한 경우가 있습니다.미리 양해해 주십시오 | ||
English ver.
PDF Files
Advice : Save target on your disk before openning.
English Hardware Manual
English Software Manual
Software
HeartToHeart Software
HeartToHeart Software US version
Video
Acrobatics
PT (Physical training)
Group control
Pictures
Acrobatic view
Robot view
Robot face view
Advice : Save target on your disk before openning.
English Hardware Manual
English Software Manual
Software
HeartToHeart Software
HeartToHeart Software US version
Video
Acrobatics
PT (Physical training)
Group control
Pictures
Acrobatic view
Robot view
Robot face view
조종기(별매)

| |||||||||||||
|
쇼핑몰 메뉴 카테고리의 로봇부품>EQUIPMENT에서 주문하세요.
자이로센서(별매)
  |

관련링크
- http://7130 515회 연결
댓글목록
등록된 댓글이 없습니다.