Varibo
페이지 정보
작성자 라퓨타 로봇왕국 작성일 09-10-09 00:48 조회 29,372 댓글 0본문

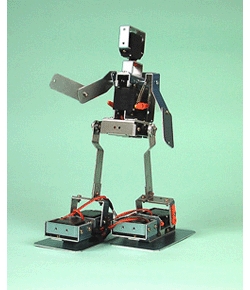
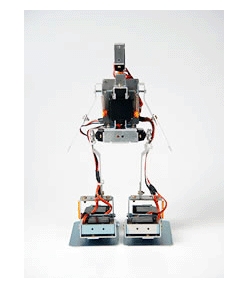
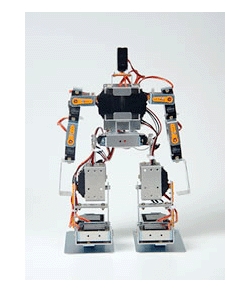
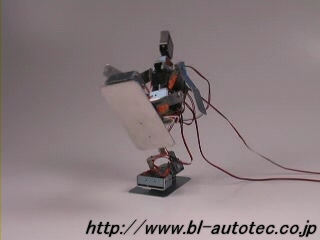
VariBo
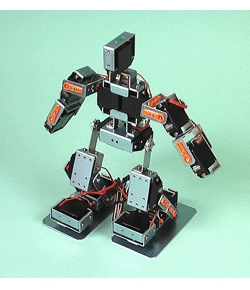
구입 후 조립해야합니다. 매뉴얼은 일본어입니다.
VariBo spec.
|
size |
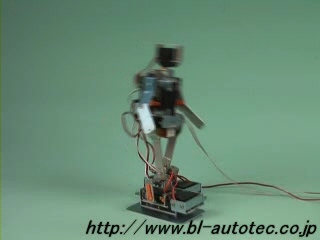
270 mm (휴머노이드 제작 시) |
|
weight |
0.75kg (batt. 탑재, 휴머노이드 제작 시) |
|
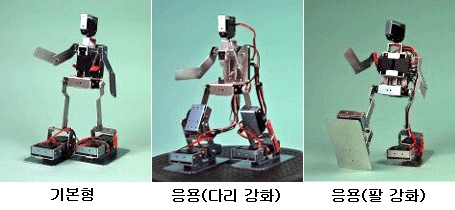
관절자유도 |
총 6 자유도로 조립 가능 |
|
control board |
OAKS-8 |
|
servomotor |
2BBMG × 6 |
|
외부연결 |
RS232C (PC용) |
|
PC사양 |
구성품 | |
|
OS |
MS Windows XP |
|
|
CPU |
P3 1GHz 이상 |
Batt : NiCd, 알칼리 전지 |
|
Memory |
256M 이상 |
USB 시리얼 변환 케이블 사용 가능 |
|
I/O |
serial port 1 |
|
|
GUI |
CD-ROM 필요 |
VariCon(로봇 동작용 GUI) |
servomotor spec.
|
model |
MICRO 2BBMG |
|
size |
28×14×29.8 mm |
|
weight |
910g |
|
torque |
14(4.8V)~17(6V)kg.cm |
|
speed |
0.17(4.8V)~0.14(6V)s/60° |
| VariBo | ||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||
| 세트 구성 | ||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||
| ※A 부분 부분은 납땜 필요 | ||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||
|
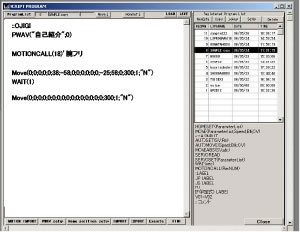
로봇 제어 어플리케이션「 | ||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||
|
■ 포지션·에디터 | ||||||||||||||||||||||||||||||||||||||||
|
GUI의 화면의 레버 조작으로 VariBo의 서보 모터의 각도를 간단하게 지정(교시)합니다.
등록한 포즈의 재생시간도 설정할 수 있기 때문에 하고 싶은 움직임을 단시간에 작성할 수 있습니다. 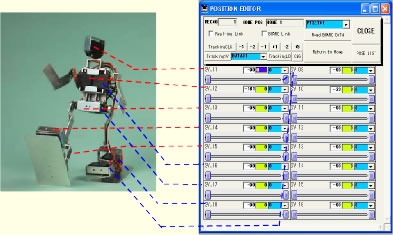
 | ||||||||||||||||||||||||||||||||||||||||
|
구성품 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
제품 카탈로그,취급 설명서는 아래표에서 다운로드할 수 있습니다.(일본어) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
※1 다운로드는 분할 다운로드로 됩니다.모든 파일을 다운로드해 사용해 주십시오. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
※2 다운로드는 다운로드 버튼 위에서 마우스 오른쪽을 클릭하고,「대상 파일 저장」 을 선택해 주십시오 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||



미디어 데이터
mpeg 파일입니다.






[이 게시물은 관리자님에 의해 2025-10-06 09:38:34 음식의효능정보에서 이동 됨]
댓글목록 0
등록된 댓글이 없습니다.