isamu|
페이지 정보
작성자 로보맨 댓글 0건 조회 11,571회 작성일 09-06-29 15:05본문
111111111111111111111111111111
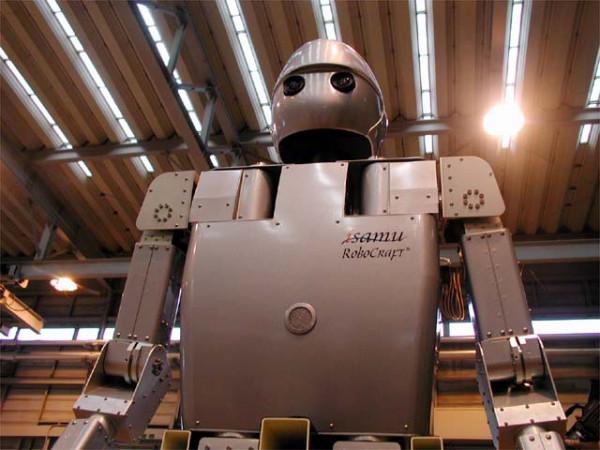
Pentium III 탑재한 2족 보행로봇 isamu
isamu(Integrated System of Advanced Motion-control Units:이삼)는, 카와다 공업 주식회사 항공·기계 사업부와 도쿄 대학의 이노우에·이나바 연구실과 공동으로 개발한 휴머노이드형 2족보행 로봇이다. 2001년 7월에 홈 페이지상에서 공개되었고 같은해 11월 공식적으로 발표, 시현되었다.
인간형 로봇의 소프트웨어의 개발에 전념하고 있는 도쿄 대학측은, 가볍고 강한 로보트 플랫폼의 제작을 위탁할 수 있는 파트너 기업을 찾던 중, 토목·건축과 항공·기계 사업(무인으로 비행할 수 있는 로봇 헬리콥터 개발)을 운영하는 카와다공업을 만나 공동 프로젝트를 시작하게되었다. isamu(이삼)는 RoboCraft(항공·기계 사업부)의 휴먼·인터랙티브·모션·컨트롤 기술과 도쿄 대학의 이노우에·이나바 연구실에서 개발된 「H6」및 「H7」의 보행 제어 시스템 기술을 접목시켜 만든 로봇이다.
||
- 외형 치수 : 1468 mm X 604 mm X 326 mm
- 중 량 : 55kg
- 자 유 도 : 32축. 팔 6자유도, 다리 6 자유도, 머리 부분 2 자유도외, 손가락끝의 그립파와 발끝등.
- CPU : Intel Pentium III 1GHz×2
- O S : RT-Linux
- 탑재 센서 : 스테레오 카메라, 가속도 센서, 촉각
- 전 원 : 내장 배터리/외부 전원
- 음 성:마이크&스피커 내장
:: 특 징
- 최대 약 2 km/h(0.56 m/s)의 가변 속도 2켤레 보행이 가능
- 죠이스틱에 의한 임의 방향의 이동이 가능
- 발끝축의 추가에 의해, 보행 속도와 계단 도상(25cm차) 능력이 증대
- 화상 센서에 의해 거리감의 인식이나 인물의 판정이 가능
- 악력 센서에 의해 임의의 파지력이 설정 가능
- 항공기의 설계·제조 기술을 응용해, 경량고강성을 실현
- 카와다 공업제의 오리지날 소형·고출력 모터 드라이버를 탑재
전신이 알루미늄으로 덮여 있어 전고 1,468 mm, 전폭 604 mm, 깊이 32.6 mm로, 중량은 55kg. 정확히 ASIMO와 P3의 중간만한 크기다(P3는 160 cm/130 kg, ASIMO는 120cm/43kg). 머리 부분에는 스테레오 카메라를 내장, 외부 환경을 인식할 수가 있다. 간접 자유도는, 2001년 7월의 발표시로는 32축이 되고 있었지만, 머리 부분 카메라의 선회축등이 생략 되어 현재는 30축이 되고 있다. 최대 보행 속도는 약 2km/h. 손가락끝에는 악력 센서가 내장되고 있어 최대 약 2 kg의 파지력이 있다.
CPU는 Pentium III 1 GHz를 듀얼로 탑재. OS는 RT-Linux가 채용되고 있다. 본체에는, IEEE 802.11 b를 이용한 무선으로 이동 명령 등을 내릴 수가 있다.
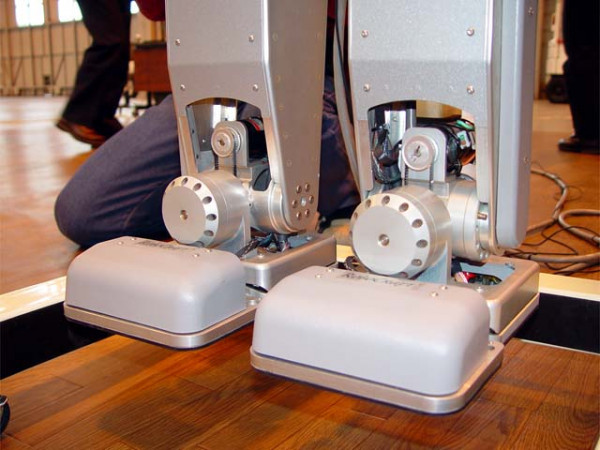
무엇보다 큰 특징으로서는, 발끝 보행을 들 수 있다. 지금까지의 2족 로봇의 상당수는, 발끝 부분이 개별적으로 가동하는 기구로는 되지 않고, 발목을 수평에 이동시켜 보행하고 있다. isamu에서는, 발끝 및, 발뒤꿈치 부분을 독립해 제어하고 있어, isamu 프로젝트 리더에 의하면, 「발끝이 독립해 움직이는 것으로, 보행 속도의 향상이나, 보다 높은 단차에의 대응이 가능하게 된다」라고 한다.
또한, 카와다공업이 자랑으로 여기고 있는 항공기와 같은 금속판 구조가 되고 있어 경량화나 강성의 강화로 연결되어 있다. 보디 뿐이라면 4 kg, 한쪽 발에서는 10 kg정도라고 한다.
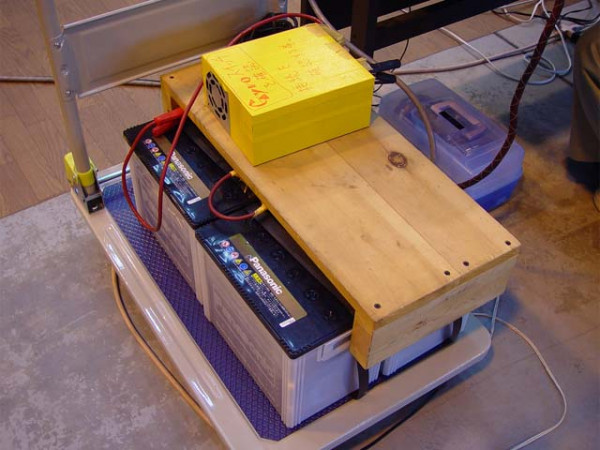
전원에 대해서는, 납배터리를 본체에 내장하는 것 외에 케이블에 의해, 외부로부터의 전원 공급도 행한다. 가동 시간은 약 7분. 납배터리를 내장한 이유에 대해서는 「내장하는 서보등의 기동시에 순간적인 대전력이 필요하기 때문에」라고 설명하고 있다.
머리 부분에는 2대의 카메라가 탑재되어 인물의 데이터등을 입력하는 것으로 특정의 인물을 구별할 수가 있다. 동체 전면 중심으로는 소형의 마이크와 스피커도 탑재되어 외부 소스로부터의 음성 입출력이 가능.
isamu는 어디까지나 연구용의 로보트이기 (위해)때문에, 판매의 예정은 없지만, 2족 보행 로봇의 연구 등에 사용하고 싶다고 하는 요청이 있으면 협조가 가능하다.
:: 이미지






PCI 인터페이스 카드가 노출되어 있다. 무선 LAN 카드가 보인다.
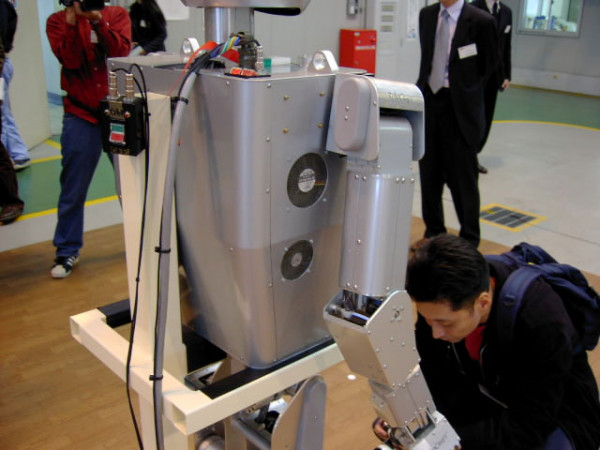
반대측의 동체에는 냉각용의 팬이 노출하고 있다.

등은 가방이 없는 깨끗이 한 구조가 되어 있다. 위가 제어 보드, 아래에 배터리가 내장되고 있다
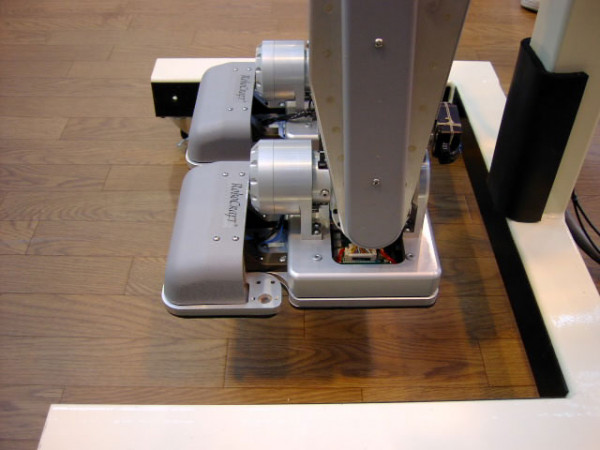
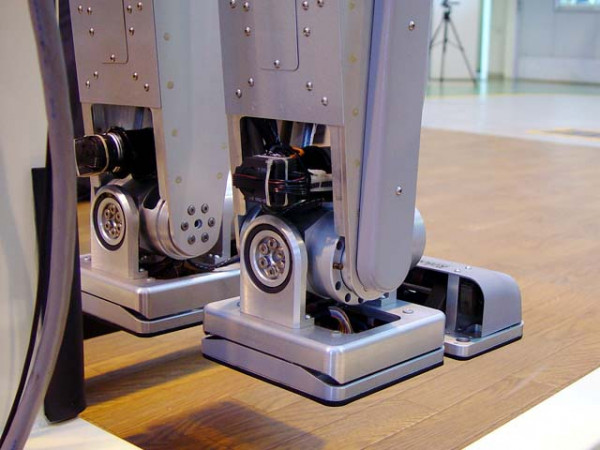
발끝 부분이 분할되고 있는 것이 알 수 있다.


3점지지의 손끝은 악력 센서를 내장하고 있어, 가졌지만 무게에 응해 최적인 힘으로 파 지킬 수가 있다.

자유도를 올리기 위한 팔의 구조가 독특하다.

데모는 유선에 의해 행해졌다. 완전 무선에서도 움직일 수 있다. 죠이스틱에 의해 리얼타임에 조작할 수 있다







외부 전원의 스윗치
외부 전원
:: 동영상
빠른속도
느린속도
:: 참 조
http://pcweb.mycom.co.jp/news/2001/11/12/12.html
http://www.kawada.co.jp/ams/isamu/index.html 카와다 공업 주식회사 항공·기계 사업부
http://www.jsk.t.u-tokyo.ac.jp/index-j.html 이노우에·이나바 연구실
HRP : NEDO(신 에너지·산업기술 종합 개발 기구)가 추진하는, 투명성이 있는 로보트 개발 플랫폼의 제공이라고 하는 컨셉에 근거하는 「인간 협조·공존형 로보트 시스템 연구개발(HRP)」사업의 이름.
도쿄대 이노우에·이나바 연구실 : 1999년에 로봇 프로젝트를 시작한 이래 「H6」와「H7」라고 하는 2개의 인간형 로봇을 만들었으며, 출산 종합연구소와 공동으로 임한 HRP에서도 로봇의 제작을 담당했다.
[이 게시물은 로보맨님에 의해 2013-09-14 21:35:28 robo_브랜드DB에서 이동 됨]
[이 게시물은 로보맨님에 의해 2013-09-15 12:09:57 브랜드DB에서 이동 됨]isamu(Integrated System of Advanced Motion-control Units:이삼)는, 카와다 공업 주식회사 항공·기계 사업부와 도쿄 대학의 이노우에·이나바 연구실과 공동으로 개발한 휴머노이드형 2족보행 로봇이다. 2001년 7월에 홈 페이지상에서 공개되었고 같은해 11월 공식적으로 발표, 시현되었다.
인간형 로봇의 소프트웨어의 개발에 전념하고 있는 도쿄 대학측은, 가볍고 강한 로보트 플랫폼의 제작을 위탁할 수 있는 파트너 기업을 찾던 중, 토목·건축과 항공·기계 사업(무인으로 비행할 수 있는 로봇 헬리콥터 개발)을 운영하는 카와다공업을 만나 공동 프로젝트를 시작하게되었다. isamu(이삼)는 RoboCraft(항공·기계 사업부)의 휴먼·인터랙티브·모션·컨트롤 기술과 도쿄 대학의 이노우에·이나바 연구실에서 개발된 「H6」및 「H7」의 보행 제어 시스템 기술을 접목시켜 만든 로봇이다.
||
- 외형 치수 : 1468 mm X 604 mm X 326 mm
- 중 량 : 55kg
- 자 유 도 : 32축. 팔 6자유도, 다리 6 자유도, 머리 부분 2 자유도외, 손가락끝의 그립파와 발끝등.
- CPU : Intel Pentium III 1GHz×2
- O S : RT-Linux
- 탑재 센서 : 스테레오 카메라, 가속도 센서, 촉각
- 전 원 : 내장 배터리/외부 전원
- 음 성:마이크&스피커 내장
:: 특 징
- 최대 약 2 km/h(0.56 m/s)의 가변 속도 2켤레 보행이 가능
- 죠이스틱에 의한 임의 방향의 이동이 가능
- 발끝축의 추가에 의해, 보행 속도와 계단 도상(25cm차) 능력이 증대
- 화상 센서에 의해 거리감의 인식이나 인물의 판정이 가능
- 악력 센서에 의해 임의의 파지력이 설정 가능
- 항공기의 설계·제조 기술을 응용해, 경량고강성을 실현
- 카와다 공업제의 오리지날 소형·고출력 모터 드라이버를 탑재
전신이 알루미늄으로 덮여 있어 전고 1,468 mm, 전폭 604 mm, 깊이 32.6 mm로, 중량은 55kg. 정확히 ASIMO와 P3의 중간만한 크기다(P3는 160 cm/130 kg, ASIMO는 120cm/43kg). 머리 부분에는 스테레오 카메라를 내장, 외부 환경을 인식할 수가 있다. 간접 자유도는, 2001년 7월의 발표시로는 32축이 되고 있었지만, 머리 부분 카메라의 선회축등이 생략 되어 현재는 30축이 되고 있다. 최대 보행 속도는 약 2km/h. 손가락끝에는 악력 센서가 내장되고 있어 최대 약 2 kg의 파지력이 있다.
CPU는 Pentium III 1 GHz를 듀얼로 탑재. OS는 RT-Linux가 채용되고 있다. 본체에는, IEEE 802.11 b를 이용한 무선으로 이동 명령 등을 내릴 수가 있다.
무엇보다 큰 특징으로서는, 발끝 보행을 들 수 있다. 지금까지의 2족 로봇의 상당수는, 발끝 부분이 개별적으로 가동하는 기구로는 되지 않고, 발목을 수평에 이동시켜 보행하고 있다. isamu에서는, 발끝 및, 발뒤꿈치 부분을 독립해 제어하고 있어, isamu 프로젝트 리더에 의하면, 「발끝이 독립해 움직이는 것으로, 보행 속도의 향상이나, 보다 높은 단차에의 대응이 가능하게 된다」라고 한다.
또한, 카와다공업이 자랑으로 여기고 있는 항공기와 같은 금속판 구조가 되고 있어 경량화나 강성의 강화로 연결되어 있다. 보디 뿐이라면 4 kg, 한쪽 발에서는 10 kg정도라고 한다.
전원에 대해서는, 납배터리를 본체에 내장하는 것 외에 케이블에 의해, 외부로부터의 전원 공급도 행한다. 가동 시간은 약 7분. 납배터리를 내장한 이유에 대해서는 「내장하는 서보등의 기동시에 순간적인 대전력이 필요하기 때문에」라고 설명하고 있다.
머리 부분에는 2대의 카메라가 탑재되어 인물의 데이터등을 입력하는 것으로 특정의 인물을 구별할 수가 있다. 동체 전면 중심으로는 소형의 마이크와 스피커도 탑재되어 외부 소스로부터의 음성 입출력이 가능.
isamu는 어디까지나 연구용의 로보트이기 (위해)때문에, 판매의 예정은 없지만, 2족 보행 로봇의 연구 등에 사용하고 싶다고 하는 요청이 있으면 협조가 가능하다.
:: 이미지
PCI 인터페이스 카드가 노출되어 있다. 무선 LAN 카드가 보인다.
반대측의 동체에는 냉각용의 팬이 노출하고 있다.
등은 가방이 없는 깨끗이 한 구조가 되어 있다. 위가 제어 보드, 아래에 배터리가 내장되고 있다
발끝 부분이 분할되고 있는 것이 알 수 있다.
3점지지의 손끝은 악력 센서를 내장하고 있어, 가졌지만 무게에 응해 최적인 힘으로 파 지킬 수가 있다.
자유도를 올리기 위한 팔의 구조가 독특하다.
데모는 유선에 의해 행해졌다. 완전 무선에서도 움직일 수 있다. 죠이스틱에 의해 리얼타임에 조작할 수 있다
외부 전원의 스윗치
외부 전원
:: 동영상
빠른속도
느린속도
:: 참 조
http://pcweb.mycom.co.jp/news/2001/11/12/12.html
http://www.kawada.co.jp/ams/isamu/index.html 카와다 공업 주식회사 항공·기계 사업부
http://www.jsk.t.u-tokyo.ac.jp/index-j.html 이노우에·이나바 연구실
HRP : NEDO(신 에너지·산업기술 종합 개발 기구)가 추진하는, 투명성이 있는 로보트 개발 플랫폼의 제공이라고 하는 컨셉에 근거하는 「인간 협조·공존형 로보트 시스템 연구개발(HRP)」사업의 이름.
도쿄대 이노우에·이나바 연구실 : 1999년에 로봇 프로젝트를 시작한 이래 「H6」와「H7」라고 하는 2개의 인간형 로봇을 만들었으며, 출산 종합연구소와 공동으로 임한 HRP에서도 로봇의 제작을 담당했다.
관련링크
- http://4061 582회 연결
댓글목록
등록된 댓글이 없습니다.