[인터뷰] 한국과학기술원 전자전산학과 한사랑 로봇 담당자 박귀홍
페이지 정보
작성자 로보맨 댓글 0건 조회 78,373회 작성일 09-06-24 16:01본문
111111111111111111111111111111
SEE-KAIST 2003년 전시참관 중, MRDEC(마이크로로봇설계 교육센터) 부스에서 만난 한사람 로봇(HSR-III)의 제작자 중 한명인 한국과학기술원에 박사과정 박귀홍씨와의 즉석인터뷰를 가지게 되었다.
소개좀 부탁드립니다.
한국과학기술원 전자전산학과 박사과정을 밟고 있는 박귀홍이라고 합니다.
e-mail : khpark@vivaldi.kaist.ac.kr
한사람로봇(HSR)에 대해 설명을 부탁드립니다.
한사람 로봇(HSR)은 2001년 한국과학기술원 전자전산학과 김종환 교수님의 지도하에 저를 비롯한 4명의 학생들이 제작한 로봇입니다. 2001년을 시작으로 한개단씩 업그레이드된 로봇을 제작하여, 최초 모델 HSR-I을 시작으로 현재 HSR-V까지 다섯모델이 나와있습니다.

HSR는 주로 석사학생이 개발을 담당했었습니다. 이 당시에 저희 실험실에서 인간형 로봇에 대한 연구를 처음으로 시작한 셈이구요. 2002년 1월 경에 HSR-II가 다시 나왔구요... 이것도 석사학생 위주로 개발이 되었구요. HSR-I의 구조적인 문제를 해결하고자 개발되었습니다. 하지만 I, II 모두 서보모터를 사용한 로봇이라서 모터의 토크가 모자라서 상체부를 올리는 것에 대해서는 거의 불가능 했습니다. 그래서 소형 DC 모터를 사용한 인간형 로봇을 개발하고자 했고 이 로봇이 HSR-III 입니다.
이 HSR-III 같은 경우는 2002년 5월 말에 FIRA 세계대회 경기 종목중에 휴로솟이라는 종목이 있는데 그걸 겨냥하여 개발되었습니다. 이를 개발하기 위해서 박사과정 3명, 석사과정 1명이 매달려서 몇달의 밤샘 작업을 통해서 로봇이 나왔습니다. 다행히도 5월 FIRA 세계대회에서 1등을 함으로써 그간 저희들의 고생을 잊게 해 주었습니다. 물론 이 모든 것에는 교수님께서 여러방면으로 지도를 해 주셨구요...
전시장에서 휴먼로봇으로는 유일한것 같은데
예, 현재 카이스트에서 만들어진 휴먼로봇은 CT과에 있는 아미와 저희가 만들 한사람로봇이 전부입니다.
HSR개발에 참여한 나머지 분들은
모두 졸업하시고 저혼자 남았습니다. 저도 5년차라 내년에는 졸업입니다.
그럼 HSR은 중단되는 것인가?
아니죠, 한 개인의 프로젝트라기 보다는 학과에서 계속 발전시키는 개념으로 봐야겠죠. 지금보시는게 세번째인데 이거는 프로그래밍 입력방식으로 하체는 DC모터를 사용했고 상체는 서보모터를 사용했습니다. 작년에 개발된 4번째 모델은 서보모터를 사용하였고, 센서를 장착해서 자율보행이 가능하게끔 제작도었습니다. 지금 개발중인 5번째 모델은 아직 완성되지 않은 상태입니다. 이번에 못가지고 그런 이유때문입니다.
졸업후 어떤곳에서 일을 하게되나
글쎄요. 아직까지는 로봇이라는 분야가 반도체처럼 확실한 산업적 기반을 가지고있는게 아니라서.. 이전에 졸업하신 분들도 삼성 메카트로닉스센터에 입사하거나, 해외로 유학을 가시거나, 다른 전자제품쪽으로 가시는 등, 이렇다할 확실한 코스가 마련되어 있지는 않습니다. 개인적으로는 현재 일어나고 있는 로봇에 대한 관심증대가 매우 고무적인 일이지만, 국내 대기업에서 미래를 내다보는 거시적인 안목으로 지능형로봇이나 휴먼로봇에 대해서 집중적인 투자를 해주는 것이 확실한 대안중에 하나라 생각됩니다.
기업의 투자는 물론 빼놓을 수 없는 부분이다. 그러나, 오늘 전시회를 본 느낌으로는 카이스트에서도 로봇에 관련한 인식을 달리해서 모든 힘을 한곳에 모을 수 있는 로봇센터를 만들어 집중적인 연구를 해야될 것 같은 생각이들었다. 로봇이란게 어짜피 종합예술같은거 아닌가? 이부분을 질문해 보았다.
카이스트에서 화끈하게 로봇센터하나 만들어서 집중적으로 투자하면 좋을 텐데...
그러게요.. 웃음.. 지금있는 이 부스가 로봇기반산업여건조성 사업의 일환으로 만들어진 마이크로로봇설계 교육센터입니다. 비슷한 역할은 하고 있지만, 말씀하신 휴먼로봇이나 지능형로봇으로는 아직 영역의 확대가 안되고 있는 상황입니다. 뭐, 학생이라 정책적인 내용은 잘몰라서... 언젠가는 휴먼로봇과 지능형로봇을 담당할 중심이 세워지겠지요.
현재 기발하고 있는 HSR-V는 어떤 로봇인가?
기본적으로 프로그래밍된 동작과 함께 센서의 인식과 이의 처리를 통한 자동동작의 기능이 가능합니다. 로봇축구대회에서 휴로솟이라는 경기는 완전자율동작에 의한 팀대항 로봇축구경기인데 국내에는 8월에, 세계대회는 10월에 오스트리아에서 열립니다. 그때까지 로봇을 완성시켜 세계대회에 참여할 예정입니다.
HSR-III 세부사양 및 특징
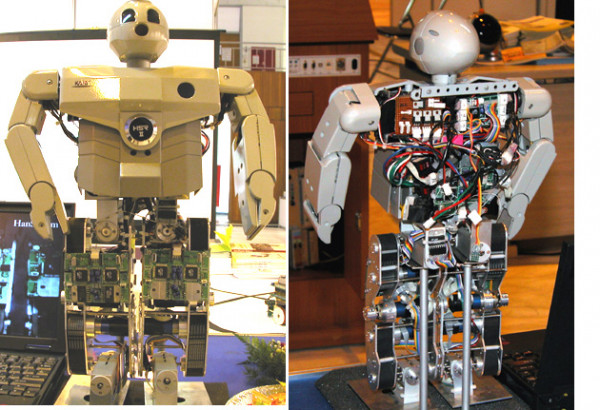
크기: 45cm
무게: 4.6kg
자유도: 22 D.O.F.( 하체: 12 D.O.F., 상체부: 10 D.O.F.)
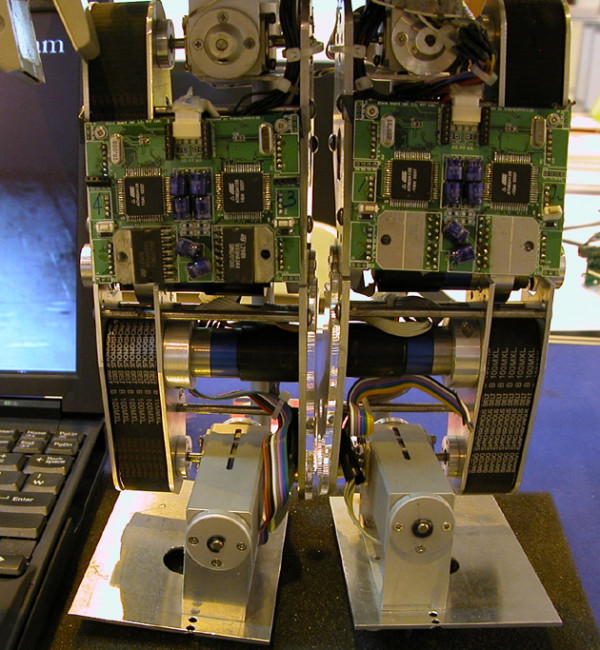
구동기: 12개의 DC 모터(하체부), 10개의 RC 서보 모터(상체부)
- DC 모터는 스위스 미니모터사의 제품을 이용
- 1회전당 512개의 펄스를 내주는 엔코더가 달려 있슴.
컨트롤러 :
- 펜티엄 III-500MHz 급 (마스터 컨트롤러)
- 8개의 ATmega128 컨트롤러
보행메커니즘 :
- 시뮬레이터를 이용한 궤적을 생성
- 로봇내에 내장되어 있는 펜티엄 III에 저장
- 각 마이크로 컨트롤러들은 일정시간마다 로봇이 이동할 데이타를 받아서 제어.
보행시뮬레이션 :
- 시뮬레이터에서 로봇의 보행을 크게 비주기적인 보행과 주기적인 보행으로 나누어 이용
- 로봇이 서 있다가 어느정도 걸어가서 멈추어서는 동작의 예
1. 처음에 서 있다가 중간에 주기적인 걸음새로 들어가기 전까지를 출발 단계의
비주기적인 걸음새로 생각(A 걸음새)
2. 계속 걸어가는 단계를 주기적인 걸음새로 생각하시면 되구요..(B 걸음새)
3. 마지막으로 멈추기 위해서 주기적인 걸음새에서 멈추는 단계를 멈춤 단계의
비주기적인 걸음 새(C 걸음새)
- 결국 서 있다가 걸어가서 멈추어 서기 위해서는 A + B + C 의 걸음새가 필요
A와 B, B와 C 사이는 부드럽게 연결되어야함.
이상으로 카이스트 전시회에서 만난 한사람 로봇 담당인 박귀홍씨와의 미니인터뷰였다. 협조해주신 박귀홍씨께 감사를 드리며, 후에 메일로 전달 받은 HSR-III의 사양과 내용을 마지막에 적어보았다.
댓글목록
등록된 댓글이 없습니다.