[리뷰] 국내 최초 2족 보행 공룡로봇 '알포'
페이지 정보
작성자 로보맨 댓글 0건 조회 12,006회 작성일 09-06-23 01:03본문
111111111111111111111111111111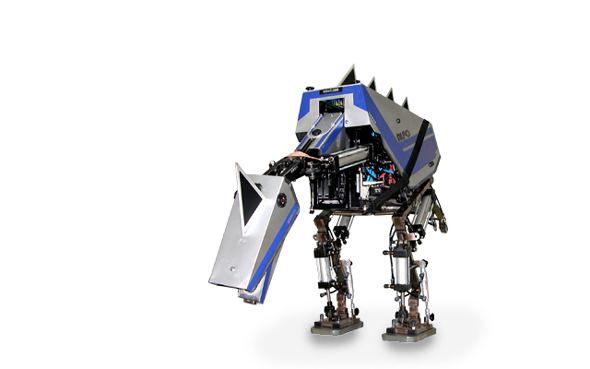
첫번째 리뷰기사가 나간지 벌써 한달 반이나 되었다. 알포의 외형적인 부분은 첫번째 리뷰를 통해서 충분히 살펴보았고 이번에는 동작과 제어에 관한 내용을 살펴볼 차례다. 2족보행이 시작된지 얼마되지 않은터라 많은 자료가 부족한 현실이다. 그나마 구할 수 있는 내용이라면 혼다의 '아시모'나 소니의 'SDR-4X'와 관련된 홍보자료 내지는 인터뷰자료가 전부이다.
그런와중에 마침 국내의 최초 2족보행 공룡로봇인 '알포'의 제작자, (주)로보쓰리 김준형 대표께서 '알포'를 제작하면서 느낀 생생한 내용을 제작기의 형태로 제공해주셔서 리뷰코너에서 이를 공개하려한다. 제작자의 심정과 제작현장의 생생한 느낌을 전달하는 귀중한 자료를 제공해주셔서 로보맨을 대표해서 감사드린다.
제작기
제작동기 "일본혼다사의 <아시모>가 대단히 충격적인데...", "4족보행부터 만들까? 2족보다는 훨씬 쉬울텐데..." 이런저런 생각을 하면서 콘셉을 잡던중 쥬라기공원 메이킹필름을 보게 되었습니다. 그래 공룡이다! 4-50마리 만들어서 죽기전에 공룡테마파크나 만들어보자(돈 많이 벌면)해서 시작된게 <알포>의 시작이었습니다.
첫째날 개인적으로 스티븐스필버그를 좋아하던터라(많은분들도 마찬가지겠지만) <쥬라기공원> 제작시 만들어진 공룡뼈대를 비디오로 보면서 설계에 들어갔습니다.
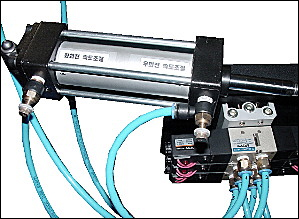
둘째날 다음 문제는 동력원이었습니다. 전기/공압/유압 3가지중 전기는 제가 너무 많이 다뤄봐서 재미가 없을것 같았고, 유압은 너무 부담스럽고..해서 공압쪽으로 방향을 잡았습니다. 또한 공룡무게가 100kg정도는 될거라 판단되어 내경40mm 공압실린더를 기본으로 설계에 들어갔고, 추후 콤프레샤를 몸체에 내장하리라 생각해서 저소음콤프레샤의 카다록을 수집했습니다.
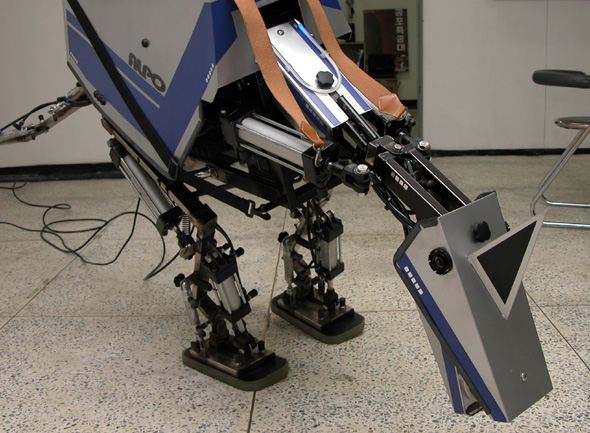
본체는 스텐리스스틸로 결정했는데 이유는 로봇1<아론>에서 스틸을 사용했는데 10년정도 지나니까 전부 부식되는 문제가 발생했기에 피했고 알루미늄은 공룡하중에는 부적절하리라는 판단때문이었습니다. <알포>라는 이름은 제가만든 4번째로봇(robo4)의 의미로 이니셜R4를 따온것입니다.
셋째날 뼈대는 사실 판매할 의도가 없었기 때문에 대충 대충 만들었습니다. 2족보행기술에 중점을 두었기 때문에 특별히 마감처리가 중요치 않다고 생각이 들었고, 하루라도 빨리 완성하고픈 생각이 앞섰기 때문이었다고 생각됩니다.
제일먼저 몸통부분 그리고 다리,머리,목,꼬리 순으로 작업을 하였으며 시간단축을 위해 4각 파이프를 사용하였습니다. 무게에 따른 실린더압력을 계산해 각 관절부위에 실린더 홀더를 부착하였으며, 전체길이는 3M를 기준으로 꼬리를 맞추었습니다. 나중에 꼬리관절을 한토막 잘라냈는데, 이유는 운반에 너무 불편했기 때문입니다. 사실 엘리베이터에도 들어가야했기 때문에 크기를 욕심대로 할수가 없었습니다.
대퇴부 관절은 소니사의 아이보와 같은 구조를 채택했는데, 추후 바뀌고 말았습니다. 완구 개념의 소형로봇은 다리를 바닥에서 밀고 당길때 바닥과의 마찰력이 그다지 문제가 되질않지만 100kg급의 로봇에서는 마찰력이 커지면 카펫이 찢어지든지, 바닥재질이 모두 망가져버린다는걸 알았습니다. 매우 중요한 경험이었습니다.
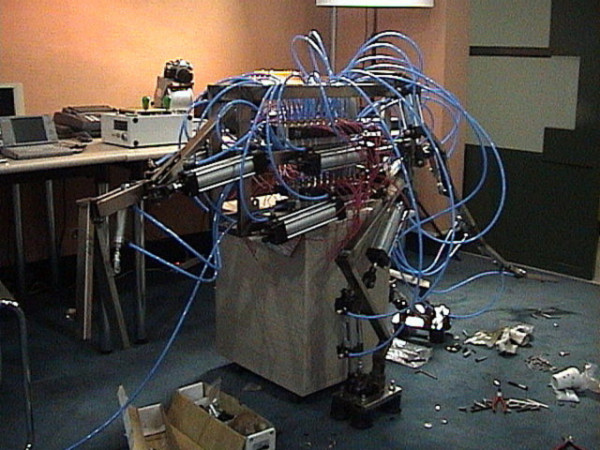
넷째날 바디에 실린더(17개)와 솔레노이드블록(20개) 제어보드 등을 부착하기위해 레이아웃을 잡았습니다. 부품에 맞게 바디가 설계되는것이 정석이나 워낙 바디가 부품에 비해 컸기때문에 크게 문제삼지않았습니다.
제어보드는 PLC를 사용하였으며 아웃풋40((실린더17개*2)+오디오제어용+여분)점과 인풋26(각관절아날로그값10개+수동버튼16개)점 정도를 사용하였으며 추후 센서입력을 고려해 AD콘버터10점 DA콘버터 2점을 추가하였습니다.
제어보드위치는 바디윗쪽으로 올렸는데 안정성 및 이물질침투등으로 부터 최대한 피하기 위함이었고 아랫쪽은 추후 콤프레샤와 밧데리등을 내장시킬때 무게중심을 아래로 주기위해서였습니다.
꼬리와 다리부분은 최대한 깨끗하게 처리하기위해(만들고 보니 지저분했슴) 위치제어센서와 실린더외에는 부착하지 않았고, 발바닥은 우레탄고무를 이용했는데 충격흡수력이 매우 좋았습니다.
다섯째날 소프트웨어와 배선을 제외하고는 모든 하드웨어를 끝냈습니다.
사실 5일만에 끝난것 같지만 추후 계속해서 보완하고 업데이트한걸로 보면 20일정도는 계산되어야 할겁니다.

여섯째날 프로그램작업에 들어가기전에 전반적인 알고리즘을 구축하였는데, 항상 로봇을 만들다보면 이작업이 매우 중요합니다. PLC프로그램작업에서는 수천개의 내부입력 또는 출력단자 등을 미리 정리해놓아야 프로그램개발시 많은 시간이 절약된다는 것을 알았습니다.
처음에는 2족보행은 제쳐놓고 쉬운프로그램으로 워밍업을 하였으며, 머리흔들기,올리기,내리기,꼬리흔들기,올리기,내리기,포효하기 등등 재미있는 동작은 생각나는대로(오랫동안 관심이 있었기에 쉬웠슴) 입력을 했습니다.
일곱 (이하 날짜순이 아닌 작업순으로 기록됨) 기본동작을 프로그램하고 바로 걷기에 들어갔는데 의외로 간단하지가 않았습니다. 그동안 전세계에서 개발된 여러로봇자료들을 참고하면서 걸음걸이를 구분동작으로 입력해보았는데.... 여러번 엎어지고 넘어지고... 할수없이 자이로를 내장하기로 마음먹고 제작에 들어갔습니다.
자이로는 고속저소음모터에 광센서를 연결해 기계식으로 만들었는데 나중에 알고보니 외국제품으로 기성품들이 있더군요. 가격은 다소 비싸지만 정밀도면에선 아주 좋다는 생각이 듭니다(저도 아직 사용해보진 않았슴). 광센서에서 출력되는 전압을 AD콘버터를 이용해 10BIT디지틀신호로 프로그램에 적용시켰습니다.

그래도 안정된 걸음은 되질않고 더욱 불안정스런 상황이 되니까...후회도 되더라구요. "4족보행기로 갈껄....." 그런날이 며칠 지난뒤 갑자기 "어렵게 풀지말고 단순히풀자"라는 생각이 들어서 구분동작을 하나 하나 지우면서 동작을 단순화 시켜나가는데...왠일입니까? 걸음걸이가 될것같은 느낌이 오더라구요. 그날부터 잠이오지않았습니다.
여덟 야간작업을 며칠한 뒤 자세를 점검하니 아무래도 다리쪽에 부착된 실린더가 힘이 부족하단 생각이 들기 시작했습니다. 자이로에 의해 제어를 한다해도 실린더가 받혀주질 못하니 중심을 못잡는 현상이 계속 발생했습니다.
특별히 약하다고 생각된 부위(허벅지,발목)의 실린더를 내경60mm로 교체하니 상황은 훨씬 좋아졌으나 결과는 마찬가지였습니다. 스테핑모터제어와는 달리 실린더에서 위치제어가 용이하질 않았단 생각이 들어 발목관절에 4개의 위치제어 포텐션메터를 부착해 현상황을 PLC에서 계속 체크하게 하였더니 상황은 역시 나아졌으나 결과는 또 실패였습니다. "역시 2족보행은 지금의 내실력으론 어림없군...." 하며 며칠간 고민에 들어갔습니다.
집에서고 사무실에서고 혼자 걸음걸이를 바꾸어가며 생각하던중 길거리에 모여있는 비둘기를 보았습니다. "비둘기도 하물며 2족보행을 하는데...굳이 사람걸음만 연구할것이아니라....걷기만한다면....비둘기도 좋고....팽귄도좋고....팽귄!!!!" 다리가 짧은관계로 뒤뚱거리지만 기본적으로 2족보행을 한다는 개념에서 아이큐가 낮은(상대적이지만) 가축이나 짐승에서 일단 단순한 걸음걸이, 즉 사람기준에 너무 억매이지 말자라 생각하고 다시 매달렸는데.... 마침내 제자리걸음이 시작되었습니다. 환희... 그자체였습니다.

아홉 제자리걸음이 되자 조금씩 앞발을 내밀기 시작했습니다. 처음에 너무 큰 보폭을 시도하니 불안해보였거든요. 프로그램을 하면서 느낀건데, 스스로 걷는다는 표현이 맞을지, 어느순간 너무 복잡한 알고리즘에 제자신도 어떤동작이 결과로 표출될지 모르는 상황이 몇번 있었는데, 혼자 걷드라구요. 물론 프로그램에 의해 움직이는거지만 제자신이 생각한것과 다르게 표출되다보니 그런생각이 든겁니다.

일단 걷기시작하니 우회전 좌회전은 쉽게 작업이 되었고, 재미를 더하기위해 포효프로그램에 사운드칩을 연계시키고 포효소리를 첨가했습니다. 사운드소스는 영화<주라기공원>에서 뽑아썼는데 결과가 좋질 안아서 인터넷에서 다운 받았습니다. 그것도 저에게는 힘든 일이었는데, 사실 전 인터넷맹이거든요.(컴퓨터는 8비트 애플부터 시작했지만) 로봇을 만드는 사람이 하는 말치고 우습지만 사실입니다. robo3@robo3.com
PS. Image
댓글목록
등록된 댓글이 없습니다.