[리뷰] 팀웍 능력을 갖춘 자율 형 구조 로봇시스템
페이지 정보
작성자 로보맨 댓글 0건 조회 13,221회 작성일 09-07-08 11:53본문
111111111111111111111111111111
얼마전 롭해즈라는 국내의 구조로봇이 미국에서 열린 로봇경진대회 ‘로보컵(ROBOCUP)대회에서 1등을 차지해 뉴스에 난 적이 있었다. 마침, 일본 WIRED NEWS에 스타우트라는 재해 구조로봇에 관해 소개된 기사가 있어서 올리고자 한다.
- 본문 -
재해 구조에 종사하는 목적으로 만들어진 로봇은 6층 높이에서 떨어지는 콘크리트의 조각과 자갈에 맞아도 이상이 없어야한다. 재해 현장으로부터 약 30미터의 거리에서 던져넣어져도 고장이 없어야하고, 유독 물질과 불꽃, 얼 것 같는 추위와 홍수조차도 견딜 수 있어야 한다. 하지만 그런 로봇들은 개별적으로만 작업이 가능할 뿐, 딴 사람과의 공동 작업에는 매우 서투르다.
구조 현장에 여러대의 로봇이 풀어놓아지면, 곧 무질서인 상태에 빠져들 가능성이 있다. 이렇게 되면, 구조대원을 돕게 하기 위해 다수의 로봇을 보내 주는 메리트가 손상되어 버린다. 로봇들은 활동을 자발적으로 조정하는 것이 가능하지 않다. 그렇기 때문에, 인간이 1대씩 조작하지 않으면 안되고, 이러한 연유로 로봇을 사용한 조사 활동은 효율이 나쁘게 된다. 가령 현재의 최첨단 기술을 가지고 있다고 해도, 자주성에 맡겨진 구조 로봇은 결국 일의 목적을 잃게 된다. 그들이 취하는 행동은 정확함 없이 거닐거나 활동을 정지하는것 중 하나이다.
이에, 3개 대학의 연구 팀은 인간이 가지는 팀웍의 개념을 전자 기술에 옮겨 놓는 것을 목표로 로봇의 집단을 1대의 기계로 조종하는 기술을 공동개발하고 있다. 개발 작업에 매달리는 것은 미네소타 대학 http://distrob.cs.umn.edu/index.php , 펜실베니아 대학 http://www.grasp.upenn.edu/ , 캘리포니아 공과 대학 http://robotics.caltech.edu/ 의 연구원들로써 미네소타 대학의 니콜라스 파파니코로폴로스 http://www-users.cs.umn.edu/~npapas/ 교수가 리더를 맡고 있다.
연구 팀은 복수의 소형 로봇에 통일 행동을 취하게 하거나, 1인의 인간으로부터 내어진 명령을 실행시키거나 자기들보다도 큰 현명한 1대의 로봇에서 지시를 받게 하거나 할 수 있는 것 같는 소프트웨어를 개발하고 있다.
파파니코로폴로스 교수에 의하면 로봇은 공기 샘플의 채취와 독성 가스의 검출, 부상자를 찾아내기 위해 광범위를 감시를 하게되는데, 한 구급 대원에게 이러한 로봇이 5, 6 대가 모이면 이를 다 소화할 수 없다고 한다. 로봇들에는 이러한 작업의 대부분을 자력으로 행하게 하지 않으면 안 된다. 통상의 경우 인간이 한번에 조작 할 수 있는 로봇은 많아도 3~4대가 전부이다.
파파니코로폴로스 교수는 '실제로 시도해 보았다. 로봇이 4대를 넘으면 구조대원들은 정보량이 너무 많고 대처 할 수 없게 되어 버린다' 라고 이야기한다.
구조대원으로써 일하는 퓨리아후카코씨는 '세계 무역 센터의 붕괴 직후에 현장에서 사용된 구조 로봇들에는 큰 기대가 걸어지고 있었다. 인간과 개는 접근할 수 있지 않는 장소에 들어가 갈 수 있었기 때문이다' 라고 말한다.
'하지만, 그러한 장소를 정말로 망라하려면 로봇의 수가 불충분했고, 또 그들은 기왓조각과 자갈의 아래를 단순히 움직이고 있을 뿐이라고 하는 느낌이었다. 만약 더 현명한 로봇이 많이 있으면 그들은 정말로 도움이 되고 있는 일 것이다'
스카우트
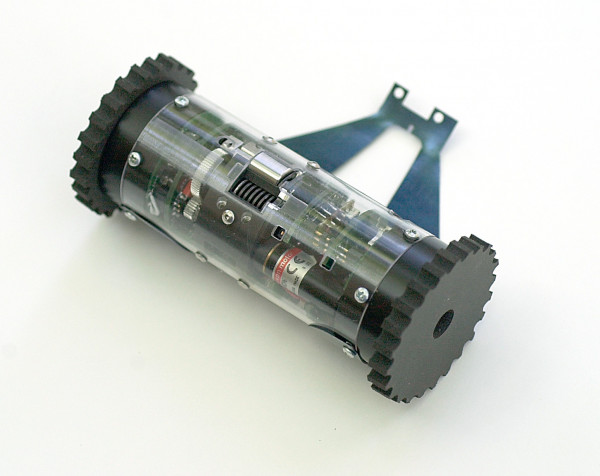
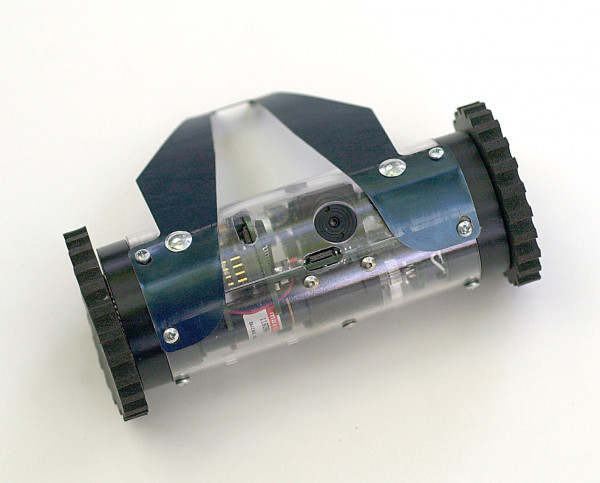
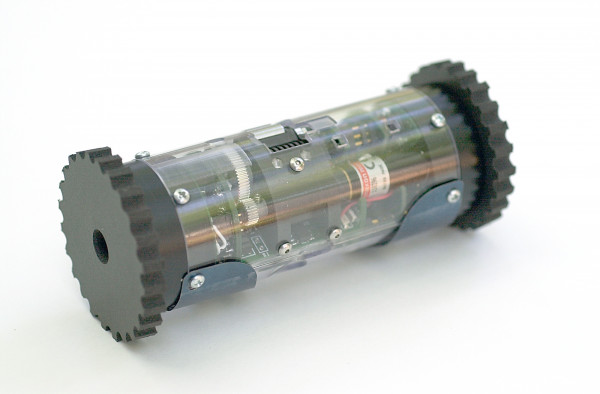
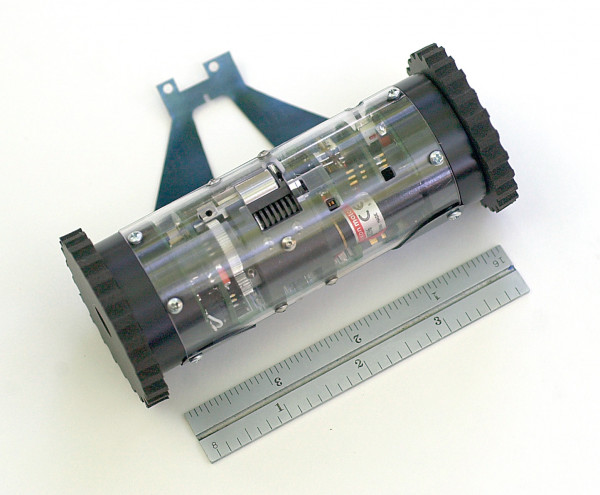
파파니코로폴로스 교수의 연구 팀은 시판된 전자기기를 재료로 '스카우트' 라고 하는 소형 로봇을 개발하고 있다. 스카우트는 길이 11cm, 직경 4cm이다. 이는 화장실 페이퍼의 심지와 비슷한 크기이다. 그 작은 본체에는 비디오 카메라 1기와 적외선 식의 거리 센서 3기, 빛 센서 2기, 온도센서 1기 (체온의 감지용 )에 있고, 주파수 수신과 신호의 암호화에 대응한 쌍방향 리모콘 시스템이 탑재해지고 있다.
파파니코로폴로스 교수의 팀은 복수의 센서를 탑재하는 것으로 스카우트가 몇개의 행동을 자력으로 생기도록 프로그램하는 것에 성공했다. 이중에는 몸을 숨길 수 있는 어두운 장소를 찾아냈을때 스카우트가 반응하는 같은 활동도 포함되고 있다.

단, 스카우트는 구조 현장에서 단독으로 운영되는 것에 별로 자신있지 않다. 로봇들은 '자기의 거처를 정확히 특정 할 수 없다. 사이즈가 작은 것과 도시 환경에서 사용하는 것을 생각하면, GPS를 사용해도 확실한 위치 파악은 기대 할 수 없다. 이 사실은 스카우트가 주변 지도를 인식하는 능력에 지극히 부정적 영향을 미치게 한다' 라고 파파니코로폴로스 교수는 설명한다.
메가 스카우트
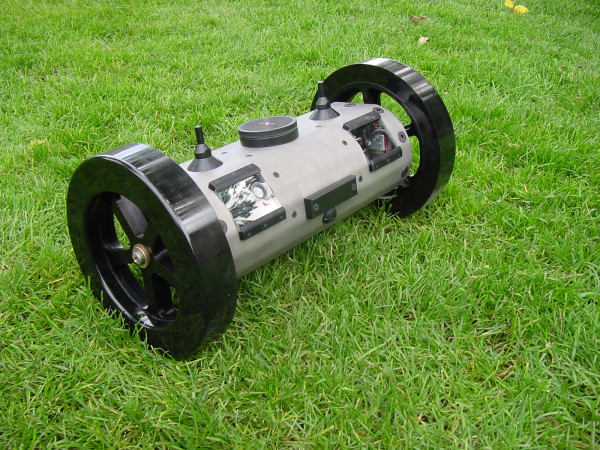

파파니코로폴로스 교수들은 이 문제의 해결책으로써 스카우트보다도 크로 똑똑한 로봇을 개발하고 있다. 이 로봇을 필두로 하는 긴급 대응 로봇의 드림팀에는 다양한 센서류와 함께 십수 대의 스카우트가 더해질 전망이다. 리더 역할의 로봇인 메가스카우트는 전체 길이가 37cm이며 대형의 센서류와 조작용 로봇팔 1개(문을 열거나, 스카우트를 들어올리거나 하기 위해)를 탑재하여 현장에서 스카우트의 팀을 컨트롤하기 위한 처리 능력이 주어진다. 메가 스카우트는 스카우트들을 정리하거나 복잡한 작업을 행하거나 인간의 조작자에 상황을 보고하는 역할을 수행하게 된다.



파파니코로폴로스 교수에 의하면 최대의 과제는 로봇 상호간 또는 로봇과 인간과의 사이에서 커뮤니케이션을 하는 수단을 개발하는 것이라고 한다. '우리들은 이 과제를 매우 어려운과제로 생각한다'고 파파니코로폴로스 교수는 이야기한다. '특정한 방향으로 이동하는 명령을 내리고 있는데, 로봇이 명령에 따르지 않는 일이 잘 일어난다. 대개의 경우는 지형의 영향과 안테나의 설계라고 하는 간섭의 문제가 원인이다'


코스타스 다니리디스 교수 http://www.cis.upenn.edu/~kostas/ 가 거느리는 펜실베니아 대학의 팀은 로봇의 시각과 인지 능력의 개량에 매달리고, 스카우트의 팀웍을 확립하는 방법에 대해서 공동 연구를 진행시켜 간다.
조엘 버딕스 교수 http://robotics.caltech.edu/~jwb/jwb.html 를 비롯하는 캘리포니아 공과 대학의 연구자는 센서를 사용한 조사와 리얼 타임의 매핑 기술을 맡고 있다. 한편, 파파파니코로폴로스 교수와 미네소타 대학의 팀은 디지털 통신을 담당하고 있다.
이 연구의 자금은 전미 과학 재단 http://www.nsf.gov 『정보 기술 연구』 프로그램에서 획득한 260만 달러의 상금에서 조달하고 있다.
- 기사 끝 -
다양한 응용
솔직히 구조용 로봇에 대한 지식은 별로 없는 편이어서 기사를 올리기 시작했을때만해도 별다른 논점을 생각하지는 못했었다. 그러나 소개된 링크를 통해 로봇의 사진을 본 순간 놀라지 않을 수 없었다.
마이크로 마우스 수준의 하드웨어가 우르르 몰려다니는 정도의 소형 로봇의 집단 행동에 대한 연구 케이스를 TV와 책을 통해 본적은 있지만, 그에 비하면 스타우트는 정말 대단히 지능적이고 합리적인 기능을 가진 로봇이라 생각된다. 특히 계단에서 점프하는 동영상은 정말 압권이다.
스타우트를 보고 있노라니 구조재해 분야 뿐만아니라 엔터테인먼트, 스마트 토이 등 다양한 응용분야를 떠올리게 된다. 관심있는 분들은 많이 참조하고 생각해보기 바란다. 그나저나 지금 이순간에도 스타우트 같이 쿨한 로봇이 만들어 지고 있을 것을 생각하니........ 왠지 잠이 안온다.
동영상
- 본문 -
재해 구조에 종사하는 목적으로 만들어진 로봇은 6층 높이에서 떨어지는 콘크리트의 조각과 자갈에 맞아도 이상이 없어야한다. 재해 현장으로부터 약 30미터의 거리에서 던져넣어져도 고장이 없어야하고, 유독 물질과 불꽃, 얼 것 같는 추위와 홍수조차도 견딜 수 있어야 한다. 하지만 그런 로봇들은 개별적으로만 작업이 가능할 뿐, 딴 사람과의 공동 작업에는 매우 서투르다.
구조 현장에 여러대의 로봇이 풀어놓아지면, 곧 무질서인 상태에 빠져들 가능성이 있다. 이렇게 되면, 구조대원을 돕게 하기 위해 다수의 로봇을 보내 주는 메리트가 손상되어 버린다. 로봇들은 활동을 자발적으로 조정하는 것이 가능하지 않다. 그렇기 때문에, 인간이 1대씩 조작하지 않으면 안되고, 이러한 연유로 로봇을 사용한 조사 활동은 효율이 나쁘게 된다. 가령 현재의 최첨단 기술을 가지고 있다고 해도, 자주성에 맡겨진 구조 로봇은 결국 일의 목적을 잃게 된다. 그들이 취하는 행동은 정확함 없이 거닐거나 활동을 정지하는것 중 하나이다.
이에, 3개 대학의 연구 팀은 인간이 가지는 팀웍의 개념을 전자 기술에 옮겨 놓는 것을 목표로 로봇의 집단을 1대의 기계로 조종하는 기술을 공동개발하고 있다. 개발 작업에 매달리는 것은 미네소타 대학 http://distrob.cs.umn.edu/index.php , 펜실베니아 대학 http://www.grasp.upenn.edu/ , 캘리포니아 공과 대학 http://robotics.caltech.edu/ 의 연구원들로써 미네소타 대학의 니콜라스 파파니코로폴로스 http://www-users.cs.umn.edu/~npapas/ 교수가 리더를 맡고 있다.
연구 팀은 복수의 소형 로봇에 통일 행동을 취하게 하거나, 1인의 인간으로부터 내어진 명령을 실행시키거나 자기들보다도 큰 현명한 1대의 로봇에서 지시를 받게 하거나 할 수 있는 것 같는 소프트웨어를 개발하고 있다.
파파니코로폴로스 교수에 의하면 로봇은 공기 샘플의 채취와 독성 가스의 검출, 부상자를 찾아내기 위해 광범위를 감시를 하게되는데, 한 구급 대원에게 이러한 로봇이 5, 6 대가 모이면 이를 다 소화할 수 없다고 한다. 로봇들에는 이러한 작업의 대부분을 자력으로 행하게 하지 않으면 안 된다. 통상의 경우 인간이 한번에 조작 할 수 있는 로봇은 많아도 3~4대가 전부이다.
파파니코로폴로스 교수는 '실제로 시도해 보았다. 로봇이 4대를 넘으면 구조대원들은 정보량이 너무 많고 대처 할 수 없게 되어 버린다' 라고 이야기한다.
구조대원으로써 일하는 퓨리아후카코씨는 '세계 무역 센터의 붕괴 직후에 현장에서 사용된 구조 로봇들에는 큰 기대가 걸어지고 있었다. 인간과 개는 접근할 수 있지 않는 장소에 들어가 갈 수 있었기 때문이다' 라고 말한다.
'하지만, 그러한 장소를 정말로 망라하려면 로봇의 수가 불충분했고, 또 그들은 기왓조각과 자갈의 아래를 단순히 움직이고 있을 뿐이라고 하는 느낌이었다. 만약 더 현명한 로봇이 많이 있으면 그들은 정말로 도움이 되고 있는 일 것이다'
스카우트
파파니코로폴로스 교수의 연구 팀은 시판된 전자기기를 재료로 '스카우트' 라고 하는 소형 로봇을 개발하고 있다. 스카우트는 길이 11cm, 직경 4cm이다. 이는 화장실 페이퍼의 심지와 비슷한 크기이다. 그 작은 본체에는 비디오 카메라 1기와 적외선 식의 거리 센서 3기, 빛 센서 2기, 온도센서 1기 (체온의 감지용 )에 있고, 주파수 수신과 신호의 암호화에 대응한 쌍방향 리모콘 시스템이 탑재해지고 있다.
파파니코로폴로스 교수의 팀은 복수의 센서를 탑재하는 것으로 스카우트가 몇개의 행동을 자력으로 생기도록 프로그램하는 것에 성공했다. 이중에는 몸을 숨길 수 있는 어두운 장소를 찾아냈을때 스카우트가 반응하는 같은 활동도 포함되고 있다.
단, 스카우트는 구조 현장에서 단독으로 운영되는 것에 별로 자신있지 않다. 로봇들은 '자기의 거처를 정확히 특정 할 수 없다. 사이즈가 작은 것과 도시 환경에서 사용하는 것을 생각하면, GPS를 사용해도 확실한 위치 파악은 기대 할 수 없다. 이 사실은 스카우트가 주변 지도를 인식하는 능력에 지극히 부정적 영향을 미치게 한다' 라고 파파니코로폴로스 교수는 설명한다.
메가 스카우트
파파니코로폴로스 교수들은 이 문제의 해결책으로써 스카우트보다도 크로 똑똑한 로봇을 개발하고 있다. 이 로봇을 필두로 하는 긴급 대응 로봇의 드림팀에는 다양한 센서류와 함께 십수 대의 스카우트가 더해질 전망이다. 리더 역할의 로봇인 메가스카우트는 전체 길이가 37cm이며 대형의 센서류와 조작용 로봇팔 1개(문을 열거나, 스카우트를 들어올리거나 하기 위해)를 탑재하여 현장에서 스카우트의 팀을 컨트롤하기 위한 처리 능력이 주어진다. 메가 스카우트는 스카우트들을 정리하거나 복잡한 작업을 행하거나 인간의 조작자에 상황을 보고하는 역할을 수행하게 된다.
파파니코로폴로스 교수에 의하면 최대의 과제는 로봇 상호간 또는 로봇과 인간과의 사이에서 커뮤니케이션을 하는 수단을 개발하는 것이라고 한다. '우리들은 이 과제를 매우 어려운과제로 생각한다'고 파파니코로폴로스 교수는 이야기한다. '특정한 방향으로 이동하는 명령을 내리고 있는데, 로봇이 명령에 따르지 않는 일이 잘 일어난다. 대개의 경우는 지형의 영향과 안테나의 설계라고 하는 간섭의 문제가 원인이다'
코스타스 다니리디스 교수 http://www.cis.upenn.edu/~kostas/ 가 거느리는 펜실베니아 대학의 팀은 로봇의 시각과 인지 능력의 개량에 매달리고, 스카우트의 팀웍을 확립하는 방법에 대해서 공동 연구를 진행시켜 간다.
조엘 버딕스 교수 http://robotics.caltech.edu/~jwb/jwb.html 를 비롯하는 캘리포니아 공과 대학의 연구자는 센서를 사용한 조사와 리얼 타임의 매핑 기술을 맡고 있다. 한편, 파파파니코로폴로스 교수와 미네소타 대학의 팀은 디지털 통신을 담당하고 있다.
이 연구의 자금은 전미 과학 재단 http://www.nsf.gov 『정보 기술 연구』 프로그램에서 획득한 260만 달러의 상금에서 조달하고 있다.
- 기사 끝 -
다양한 응용
솔직히 구조용 로봇에 대한 지식은 별로 없는 편이어서 기사를 올리기 시작했을때만해도 별다른 논점을 생각하지는 못했었다. 그러나 소개된 링크를 통해 로봇의 사진을 본 순간 놀라지 않을 수 없었다.
마이크로 마우스 수준의 하드웨어가 우르르 몰려다니는 정도의 소형 로봇의 집단 행동에 대한 연구 케이스를 TV와 책을 통해 본적은 있지만, 그에 비하면 스타우트는 정말 대단히 지능적이고 합리적인 기능을 가진 로봇이라 생각된다. 특히 계단에서 점프하는 동영상은 정말 압권이다.
스타우트를 보고 있노라니 구조재해 분야 뿐만아니라 엔터테인먼트, 스마트 토이 등 다양한 응용분야를 떠올리게 된다. 관심있는 분들은 많이 참조하고 생각해보기 바란다. 그나저나 지금 이순간에도 스타우트 같이 쿨한 로봇이 만들어 지고 있을 것을 생각하니........ 왠지 잠이 안온다.
동영상
[이 게시물은 로보맨님에 의해 2013-09-14 22:27:39 robo_컬럼&탐방에서 이동 됨] [이 게시물은 로보맨님에 의해 2013-09-14 23:41:27 리뷰에서 복사 됨]
댓글목록
등록된 댓글이 없습니다.