[리뷰] 다족보행로봇 발달사
페이지 정보
작성자 로보맨 댓글 0건 조회 13,484회 작성일 09-06-24 17:44본문
111111111111111111111111111111
지상의 운송수단에 바퀴만한 것이 없을 것이다. 기원전 3,000년 경, 물레방아, 썰매 등에 이미 사용되어지고 있었다고 하니 참으로 유수한 역사다. 그런데 빠르고 좋은 효율을 가진 바퀴가 있음에도 불구하고, 사람들은 보행에 대한 미련을 끝까지 버리지 않는 것 같다. 왜일까? 인간이 다리를 가지고 있기 때문이 아닐까? 뭐, 지금 그원인을 캐보자는 것은 아니고...
로봇에 있어서 주행이 아닌 보행의 역사는 생각보다 오래되어 왔다. 기계, 기구의 메카니즘에 대한 제약으로 많은 발전은 이루지 못했으나, 최근에 비약적인 발전이 이루어지고 있다. 과거에서 부터 현재까지 시도되어온 다족보행 로봇의 역사를 살펴보자.
1966
미국. 포니포니(애칭)의 청사진은 사우스 캐롤라이나주의 대학의 McGhee과 프랭크에 의해 만들어진 컴퓨터로 제어되는 최초의 기계이다. ( [ 토드 , 1985 ] p.24 ) .
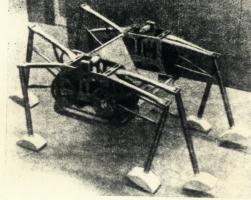
1968
미국. R.Mosher가 만든 GE의 걸어다니는 트럭. 1968년 로젝트 종료.( [Raibert , 1986b ] p.503 ) .
1973
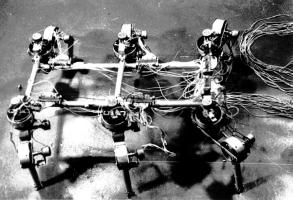
6족 보행 머신. Dr.sc.,prof .V.S.Gurfinkel , Dr.sc .A.Yu .Schneider, Dr .E.V .Gurfinkel 그리고 coll. 등이 제작.
1977
러시아. Variante Mascha. 6족 보행기계. Devjanin 교수, Gurfinkelt 교수, Lensky 박사, Schneider박사, Koll 박사.Mechanik Moskau Universit und Institut of Probleme der Informatins ertragung der russischen Akademie der Wissenschaften 협회
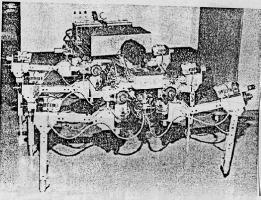
1977
러시아. Mascha. 6족보행기계. Prof.Devjonin 교수, Gurfinkel 박사. Lensky 박사 . Schneider 박사. 정보의 문제들을 위한 협회 ,과학의 전달 러시아 협회 .
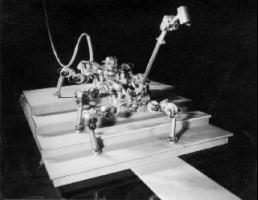
1977
OSU Hexapod. 1977에 McGhee에 의하여 Ohio 주립 대학에서 발표. 무게는 136kg ( [ Ozguner et al. , 1984 ] )
1976~1979
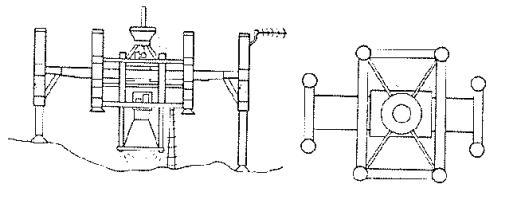
일본. Technical Research Center Komatsu Ltd. 소속의 연구원인 Y. Ishino, T. Naruse, T. Sawano 그리고 N. Honma에 의해 1976에서 1979에 걸쳐 만들어진 8족보행기 ReCUS. 리모트컨트롤에 의해 바닷속에서 측량을 한다. 길이 8m, 높이 6,4m. 넓이 5,35m. 무게 29톤으로 최고속도는 시속 0.07m/s이다.
1979
러시아. 6족보행 기계. 몸 길이 0,6m, 폭 0,25m, 다리사이의 폭 0,2m, 자동차의 무게 40kg. 러시아의 M.V .Kudriavtsev박사, V.A.Efimov, a.f.Titov, St .Petersburg 제작.
1980~1983
CMU Hexapod는 Southerland와 Sproull에 의해 만들어졌다. 길이 2.4m 이고 최고 속도는 0.11m/s에 달한다. ( [ Raibert 와 Sutherland, 83 , Sutherland와 Ullner, 1984 ] )
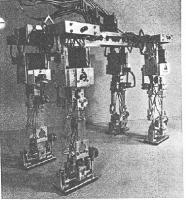
1984
일본. TITAN III 이라는 이름은 "Tokyo Institute of Technology, Aruku Norimono (walking vehicle)".에서 따온 것이다. 다리들의 길이가 1.2 미터들 이고 그리고 무게는 80 kg ( [ Hirose , 1984 , Hirose , 1985 , Yoneda 그리고 Hirose , 1992 ] ) .
1985

일본. TITAN IV는 Tsukuba의 과학 전시의 정부 가건축물에 1985에 진열되었다. 전체 무게 , 160 kg. 이모델의 세개의 시제품은 Mitsubishi 중공업에(서) 만들어졌다. ( [ Hirose , 1984 , Hirose , 1985 , Yoneda 그리고 Hirose , 1992 ] )
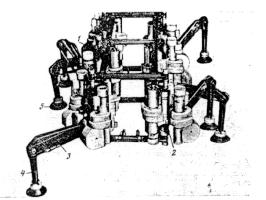
1983

미국. Odex1은 1983에 처음으로 선보였다. 이 육각류 모양의 로봇은 사바나 강가까이에 위치한 Odetics사의 실험실에서 개발됨.( [ M.E.Rosheim , 1994 ] p.247 )
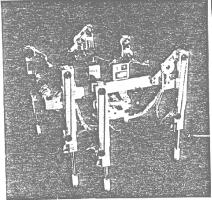
1985
일본. 4족보행기계인 Collie1은 도쿄대학의 H. Miura에 의하여 개발되었다. 기계는 12 자유도를 가지고 있다.( [ Miura et al. , 1985 , 정강이 et al. , 1989 ] )
1985
일본. 6족보행기계인 Melwalk3는 일본의 이바라키에 위치한 Tsukuba 과학성의 인공 두뇌학 분야의 기계 기술연구소에서 1985에 개발되었습니다. 전기모터에 의해 움직이며, 무게는 35kg, 화물을 24 kg까지 적재할 수 있다. ( [ Kaneko et al. , 1985a , Kaneko et al. , 1985b ] )
1985
러시아. OstRover. St. Petersburg 개발. 6족보행. 500kg 중량, 감독자 제어.
1985~1989
일본. Aquarobot. 일본 수송부 항구 연구소 로봇 공학 실험실 제작.( [ Akizono et al. , 1989 ] )
1989
미국. Attila II. 캘리포니아, 웨스트레이크빌리지, IS로보틱스 코퍼레이션의 연구그룹에 의해 개발된 4족보행. 길이 35.5 cm, 높이 20.3 cm, 폭 30.5cm, 무게1,5kg, 대략 150g의 짐 운반가능 .( [ Brook들 , 1989 , Dechau 그리고 Psihoyos , 1991 ] )
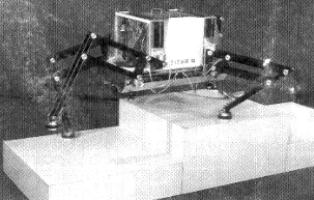
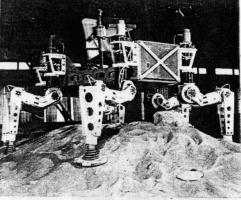
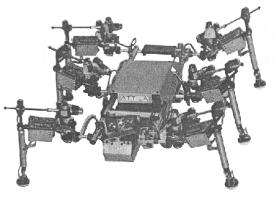
1990~1994

일본. TitanVI는 평편한 지면과 40도의 기울기를 가지는 경사 및 계단에서 빠른걸음이 가능한 시제품이다. 높이는 1.5 m, left/right 폭은 1 m, front/back 길이는 1.5 m, 전체 무게는 190 kg 이다. 20개의 120W DC 모터가 사용되어졌다. 기계는 높은 속도와 높은 출력퍼포먼스를 가지도록 설계되었다. 힘 센서는 다리의 뒤쪽에 장착되어 땅과 접촉될때 를 감지해, 지지해야할 무게를 결정하게된다. ( [ Hirose et al. , 1991b , Hirose와 Yoneda , 1991 , ] ) .
1993
영국. MARV는 잉글랜드의 서쪽의 Intelligent-Autonomous-Systems-Labor 대학교에서 개발되었다.
1998
Ecole de Technologie Superrieure의 학생들에 의하여 만들어진 Hydraumas III는 워킹 머신 SAE 10종 경기에서 첫번째 우승을 차지했다. 팀이 40kg을 운반할 수 있는 6족보행머신을 11개월동안 개발하였다. http://www.wm.etsmtl.ca
http://www.wm.etsmtl.ca/competition
1998

독일 Sir Arthur. GMD. St. Augustin. http://set.gmd.de/SET/standard/SirArthur_e.htm.
2002

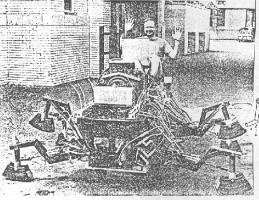
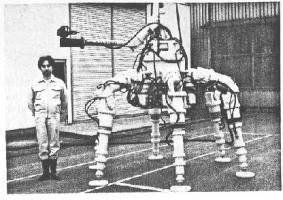
한국. 6족보행탑승형로봇. ‘제모스’(Zemos). 제작자 로보텍 김동훈 사장. 가솔린 엔진탑재
2003

한국. R7. 4족보행탑승형로봇 시제품. 제작자. 로보쓰리 김준형대표. 5월5일 한국 최초의 공압 4족보행 탑승형로봇 시제품 R7 제작발표. 무게 250kg. 시속 0.25km.
:: 참조
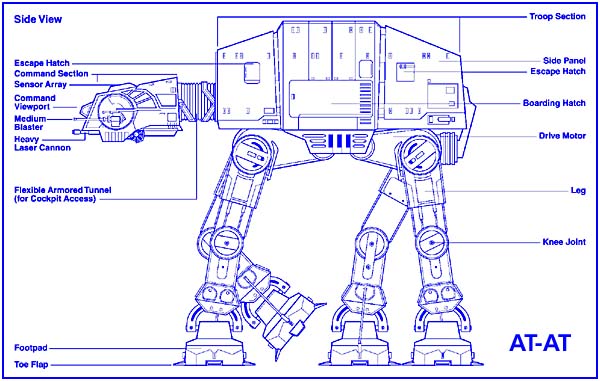
http://www.starwas.com
http://www.fzi.de/ids/WMC/walking_machines_katalog/node16. [이 게시물은 로보맨님에 의해 2013-09-14 22:27:01 robo_컬럼&탐방에서 이동 됨] [이 게시물은 로보맨님에 의해 2013-09-14 23:40:40 리뷰에서 복사 됨]
댓글목록
등록된 댓글이 없습니다.