MANOI AT01
페이지 정보
작성자 라퓨타 로봇왕국 댓글 0건 조회 29,627회 작성일 09-10-07 22:08본문
111111111111111111111111111111

구입 후 조립해야합니다. 조립 매뉴얼은 일본어입니다. 프로그램 매뉴얼은 한글판입니다.
R/C 최고 브랜드 쿄쇼 제작!
|
높은 운동성과 속도를 구비 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 로봇운동회를 위한 설계 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
(일본에서는 로봇 운동회가 자주 열림)
 MANOI AT01 spec.
servomotor spec.
디자인
「뛰어난 운동성능을 가진 휴머노이드」가 필요한 유저를 위한 로봇! 경량의 전용 캐릭터 슈트를 비롯한 운동 성능을 중시한 설계를 하여 상상을 초월한 퍼포먼스를 발휘합니다 
완전히 접히는 것이 가능한 골반의 프래임 구조에 의해 이상적인 모션 실행이 가능
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
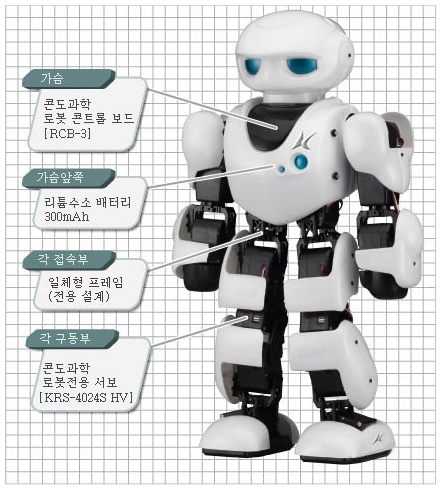


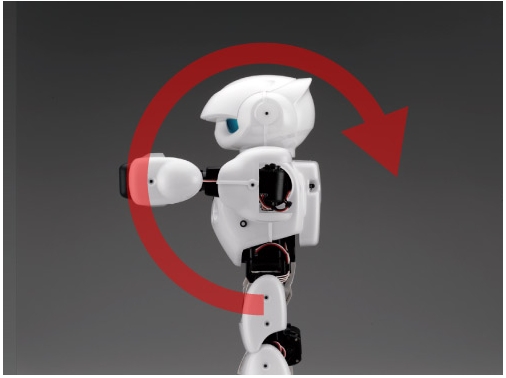
260도의 가동각도를 실현하고 다양한 포즈와 액션을 가능하게 함
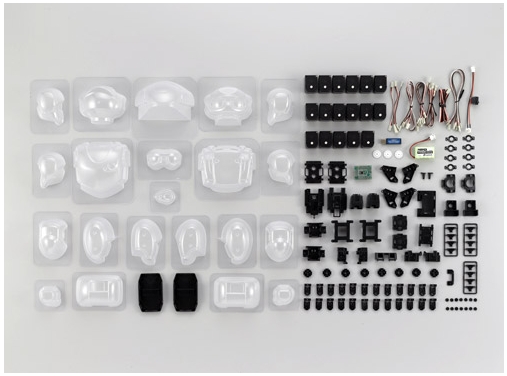
부품수 100점이 넘는 정밀 조립 로봇 키트


미디어 데이터

 |
|
|
조종기(별매)

| ||||||
|
쇼핑몰 메뉴 카테고리의 로봇부품>EQUIPMENT에서 주문하세요.
자이로센서(별매)
|


2축 가속도센서(별매)
| KONDO |
| RAS-1 2축 가속도센서(No.01076) |
| 2축 가속도센서로서 자동으로 일어서는 판정 등이 가능해집니다. |
|
●소형, 경량 22x13x10mm 2g |
|
●전원 전압 3~5V |
|
●출력전압 2축 각각에 대해 수평상태로 약 1/2DC를 출력하고 축방향의 경사에 의해 전압이 변동합니다. |
| RCB-1에는 RSC-1를 사용하여 접속합니다. 모션프로세서에는 아날로그 단자에 접속하여 사용합니다. |
| 대응기종 : MANOI PF01, AT01, KHR-1HV, 2HV |
|
쇼핑몰 메뉴 카테고리의 로봇부품>SENSOR에서 주문하세요.
  |
출처:http://raputa.biz/index.php?salegdno=378>ype=1&pgurl=
shop/sh_goods_view&ctpose=AAF&ctno=320&otype5&
[이 게시물은 로보맨님에 의해 2013-09-14 23:34:47 묻고답하기에서 이동 됨]댓글목록
등록된 댓글이 없습니다.