로봇암제작기(3관절,6서보모터)
페이지 정보
작성자 로봇디자인(robotd) 작성일 09-09-24 18:15 조회 30,539 댓글 0본문

3관절 로봇암 제작기 시작합니다.
인터넷에서 찾아보니 로봇암에 관련된 기사가 거의 없더군요. 더군다나 로봇암 제작에 관련된 기사는 아예 찾아볼 수가 없더군요. 그래서 제가 나름대로 제작해보고 제작기를 이렇게 올려봅니다.
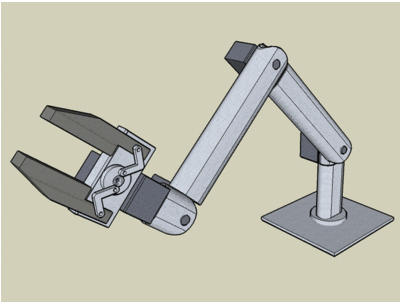
아래 그림은 "스케치업"으로 설계한 "로봇암" 입니다. 제가 가진 "알루미늄 파이프"와 "그립"를 생각해서 나름대로 설계를 했고요. 최대한 비슷하게 만들고자 했습니다.
재료 : 알루미늄판, 나무판, "ㄱ"자 금속프레임, 플라스틱재질의 클립(집게),폐건전지,은색 락카,볼트, 너트, 컨트롤러, 건전지 홀더,스프링 등
[이 게시물은 로보맨님에 의해 2013-09-15 00:00:17 묻고답하기에서 이동 됨]제작의도 : 로봇을 만드는 사람이라면 누구나 한번쯤 로봇암을 만들기를 원할겁니다. 저도 같은 이유에서 로봇암을 만들기로 결정했습니다. 일단은 로봇암 제작이 주목적이라서 클립과 컨트롤러 보드는 구매했습니다. 로봇암으로서는 첫번째 작품입니다. 자작로봇으로는 2번째 작품이네요.
성능 : 3관절( 그러나 움직이는 부분은 6군데입니다. 그래서 서보모터 6개가 사용됩니다.)
재료 : 알루미늄판, 나무판, "ㄱ"자 금속프레임, 플라스틱재질의 클립(집게),폐건전지,은색 락카,볼트, 너트, 컨트롤러, 건전지 홀더,스프링 등
컨트롤러 : "로보로보"사의 교육용 KIT "MCU보드"사용. 로봇암 제작이 주목적이기 때문에 "MCU보드"는 만들지 않았습니다. 또한 제어 SW도 "로보로보사"의 "로직SW"을 그대로 사용했습니다. "MCU보드"에는 "ATMEL CHIP"이 사용되었더군요. 혹시나 로보로보 가보실분 www.roborobo.co.kr 입니다.
1. 로봇그립(플라스틱)
"엘레파츠"에서 구매한 그립입니다. 이 단순하고 허접한 그립이 3만원이 넘더군요. 너무 비쌉니다. 그러나, 로봇암 제작이 주목적이라서 구매로 간단히 해결했습니다.

2. 알루미늄 파이프(타원형 파이프)
옥션에서 옷걸이용으로 몇천원에 구매했습니다. 구매한지 몇달 되어서 정확한 가격은 모르겠네요. 그때 남았던것을 사용했습니다. 둥근형이 아니고 타원형이라서 로봇암에 응용은 가능하지만, 사실 4각형 파이프가 더 편할것 같습니다.

3. 알루미늄판(30cm x 30cm,2T)
"엘레파츠"에서 \3,000원에 샀습니다. 알루미늄판 으로만 로봇암을 제작하려고 했었는데, 돈이 너무 많이 들것 같아서 그냥 전에 쓰던 알루미늄 파이프로 제작 들어갔습니다. 나중에 알루미늄판 으로만 로봇암을 만들어봐야 할것같습니다.

4.나무판, AA형 폐건전지
(1) 베이스판으로 알루미늄은 비싸서 굴러다니는 베니어판을 사용했습니다. 사실 무게감도 필요했습니다. 알루미늄판과 조화를 위해서 은색 락카로 도색했습니다. 락카는 \2,000~\3,000원 정도 합니다.
나무판 내귀퉁이에 구멍4개는 나사구멍입니다. 한쪽은 나사가 들어갈만한 작은 구멍을 뚫었고요. 반대쪽에는 나사머리가 완전히 들어갈 수 있도록 큰구멍을 뚫었습니다. 나무판 두께의 절반정도 까지 뚫었지요. 그래야 나사 머리가 쏙들어가서 걸리작 스럽지 않습니다.
(2) 폐건전지는 맨마지막 사진을 보시면 아시겠지만 기둥으로 마땅한 재료가 없어서 사용했습니다. 4기둥에 4개 사용했지요, 건전지는 양극이 금속재질이라서 드릴을 사용했습니다. 단지,주의 할점이 있습니다. 건전지 양쪽에 구멍을 뚫어서 나사를 박아야겠기에, 드릴로 구멍을 뚫었더니 내부의 전지용액이 섞여서 그런지 뜨거울 정도로 열이나더군요, 한개는 겉의 비닐이 녹을정도로 뚜거워서 혹시나 폭발할까봐 깡통으로 덮어 놨었습니다. 한참후에나 진정되더군요. 또 한가지 있네요. 전지용액이 흘러내려서 락카칠한 부분을 녹이더군요. 이 누액은 "산"성분이라서 금속도 녹일 수 있지요. 그래서 누액이 다 흘러내리고도 물로 한번 세척했습니다. 사진상 나무판에 울퉁불퉁한 부분이 건전지 누액때문에 발생한 부분입니다.)

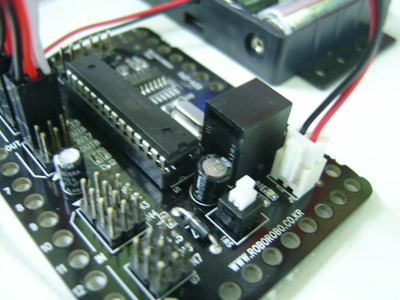
5.컨트롤러 ("로보로보사"의 "로봇교육용KIT1호"안에 있는 "MCU보드"입니다. "ATMEL사"의 CHIP 이 들어있더군요. 8입력, 8출력 가능합니다.로봇암 제작이 주목적이라서 컨트롤러도 간단히 구매로 해결했습니다.
"로보로보사 쇼핑몰"에 가시면 부품 별로도 판매가 되는데, "MCU보드"는 2만원대 정도 합니다. 보드치고는 매우 저렴한 물건이죠. 사진처럼 이 보드와 건전지 홀더만 있으면 일단 작동됩니다. 이작은 보드안에 모든 입출력부터 필요한 기능이 다들어 있습니다. 제어SW로는 "로직"이라는 교육용 SW가 있는데 아이콘화되어 있어서 어린이들도 2시간이면 다 배웁니다. 그만큼 쉽게 되어 있습니다.
6.가공된 알루미늄 파이프(이 파이프 가공하는데 너무 시간이 많이 걸렸습니다. 처음 제작이라서 조립하고 구멍 한개뚫고, 조립하고 구멍한개 뚫고 하는 작업을 계속 반복했습니다. 초보티 확실히 내면서 시간도 많이 축냈지요.
절단시에도 타원형이라서 세로로 반정도 절단하는 작업이 제대로 되지도 않고 쉽지도 안더군요. 4각형 파이프로 작업하는것이 더 쉬울것 같습니다. 어설프게 절단하고 사포로 갈아서 처리했습니다. 큰구멍은 일단 드릴로 뚫어 놓고 "리머"로 확장했습니다.
왼쪽 작은 파이프는 "ㄱ"자 프레임을 나사로 달아놓은 사진입니다. 맨 끝 관절입니다.
중간 파이프 윗쪽에 있는 4개의 작은 구멍은 서보모터 고정구멍입니다. 사진상 뒤쪽에서 서보모터가 들어가 고정됩니다. 큰구멍 구멍은 서보모터축이 들어갈 자리입니다.
오른쪽 파이프 아랫쪽 수직으로 있는 3개의 구멍은 뒷쪽에 '서보혼'고정 볼트를 돌리기 위한 드라이버 구멍입니다. 단순히 드라이버를 넣기 위한 자리입니다. 가운데 구멍은 서보모터축에 서보혼을 고정하기 위한 나사를 돌리기 위한 드라이버를 넣기 위한 자리입니다. 역시나 단순히 드라이버를 넣기 위한 자리입니다. )

7. 로봇관절에 "서보혼"을 달은 사진입니다. 이곳에 서보모터축이 연결되어서 관절 역할을 할겁니다.
이 서보혼이 "조이하비"같은 "RC쇼핑몰"에서만 판매가 되더군요. 저가품은 항상 품절이고, 고가 "혼"만이 있는데 10개에 \5,000~\6,000 정도 합니다. 택배비 별도로요. "서버혼"을 별도로 사는니 차라리 "저가형 서버모터(\15,000정도)"를 구매하시는것이 더 저렴합니다. "엘레파츠"에서 "저가형 서버모터"가 \15,000 이하에 판매되고 있습니다. 서보혼 포함인데요. 둥근형은 1개이지만 이외에 여러모양으로 5개정도 더 딸려옵니다. 저는 이 딸려온 "서보혼"을 사용했습니다.

8. "서보모터"를 달아놓은 사진입니다. "ㄱ"자 금속 프레임도 있습니다. 이 프레임도 "로보로보 쇼핑몰"에서 구매했습니다. 1개당 몇백원 했던것 같습니다. "서보모터"를 달때 간격차이 때문에 "지지대(금속)"라는것을 사용해야 합니다. 자로 제어보니 9mm 정도가 적당한데 실제로 "지지대"를 구매하려고 보니까, 사이즈가 없더군요. 그래서 5mm로 구매했습니다. 5mm의 실제 싸이즈는 6~7mm정도 합니다. 나머지 간격은 그냥 나사로 커버했습니다. 어차피 4군데 고정하면 움직이지는 않습니다. 나사와 지지대도 "로보로보 쇼핑몰"에서 구매했습니다. "로보로보 쇼핑몰"에서 파는 부품들은 "로봇교육용"입니다. 그러나 부품별로도 판매를 하다보니, 제가 많이 이용했습니다. MCU보드, 프레임,볼트,너트,지지대 등...

9. 관절연결 사진. 2개의 관절이 연결되었습니다. 이렇게 연결하려다 보니 "서보혼" 고정나사를 돌리기 위한 공간이 없어서 사진과는 다르게 "서보혼" 자리에 3개의 구멍을 더 뚫었습니다. 원래 반대쪽에는 3개의 구멍이 있었지만, 그 반대 쪽에는 필요없다고 생각했는데, 나사를 돌리려다 보니 드라이버가 들어갈 자리가 없어서, 드라이버가 들어갈 정도크기의 구멍을 뚫어야 했습니다. "서보혼"쪽에는 작은 구멍3개, 반대쪽에는 "서보혼"을 고정시키기 위한 볼트(나사)를 돌리기 위한 드라이버 구멍이 2개 더 필요합니다. 사진상의 꺽인부분에 있는 1개의 구멍 외에 드라이버가 들어갈 구멍 2개를 추가로 더 뚫었습니다.

10. 그립쪽 연결 사진입니다. 그립이 집게를 열고 닫을 "서보모터"1개와 손목에 해당되는 부분에 회전을 위한 "서보모터"(사진상 금속 프레임으로 고정한 서보모터)1개가 필요합니다. 그립에만 서보모터 2개가 소요되더군요. "로봇암 제작"이 "서보모터"가 의외로 많이 필요합니다. 특히나 이 그립부분...

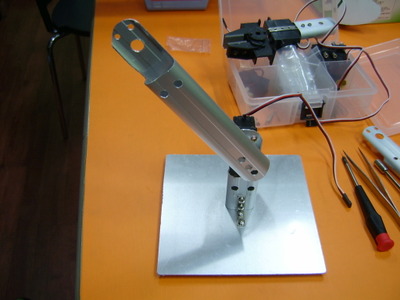
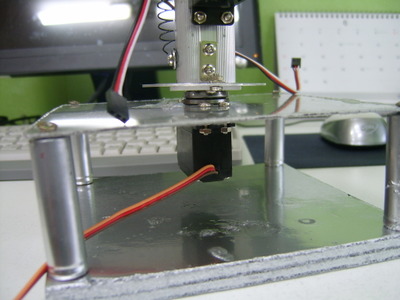
11. 밑판(알루미늄판) 조립 사진. 사진상의 밑판은 베이스판은 아닙니다. 중간판입니다. 사진을 미리 찍어 놨는데, 사실 이 사진과는 다르게 조립되었습니다. 이 사진처럼 처음에 조립했다가, 약간의 설계를 변경해서, 밑판 위에서 "로봇암"이 회전할 수 있도록 변경했습니다. 역시나, 이때문에 "서보모터"가 1개 더 들어갔습니다.
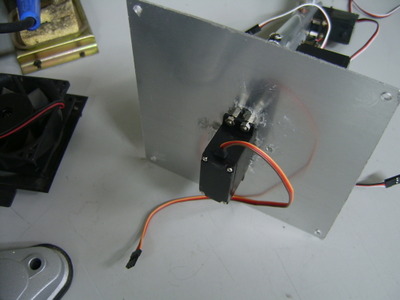
12. 이 사진처럼 말입니다. 회전을 위한 "서보모터" 1개가 밑판에 추가되었고요. 나중 사진에 있겠지만, 회전축의 무게 때문에 "쓰러스트 베어링"을 추가 했습니다. 글로 설명하자면, "도넛형"으로 생긴 베어링입니다. 인라인 스케이트 베어링과는 하중 받는 축이 다릅니다. 인라인용 베어링은 회전축에 대해서 90도 방향으로 하중을 받지안, 이 "쓰러스트 베어링"은 회전축과 같은 방향으로 하중을 받습니다.

13. 서보모터 힘이 모자를것 같아서 스프링을 사용했습니다. 나름 아이디어를 고안 했습니다. 전에 보니까 서보모터가 우리 생각보다는 힘이 없어서 약간만 무거워도 작동이 제대로 되지 않더군요. 그래서 스프링으로 하중을 좀 이겨보려고 시도했습니다. 끝말에 쓰겠지만, 스프링으로만 해결되지 않았습니다. 정확한 "서보모터"의 "도크"나 "하중"을 계산해야 하는데, 대강 잡동사니통에서 찾은 스프링을 사용하다보니 선택권이 전혀 없었습니다. 그래도 있는것이 나을것 같아서 주먹구구식으로 달았습니다.
14.맨아래 도색된 나무판(베이스)보이시나요. 그위 4군데 모서리에 도색한 건전지 기둥이 보이실겁니다. 바로 폐건전지는 이곳에 사용되었습니다. "AA"건전지 였습니다만, 좀더 무거운것이 필요하더군요. 밑판이 로봇암무게 보다 가벼워서 밑이 약간씩 들립니다.
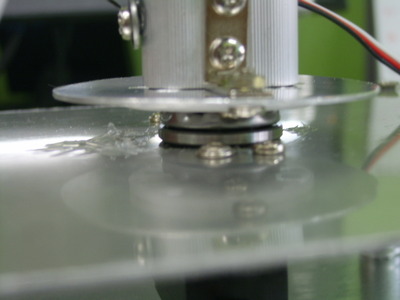
15. "쓰러스트베어링" 사진
사진 중간에 베어링 보이시나요. "서보모터"위에 금속부분이 "쓰러스트 베어링"입니다. 저는 베어링에 대한 지식이 없어서 대강 한개 골랐습니다. 지름이 3mm 정도되는 물건을 옥션에서 \5,000원정도에 구매해서 사용했습니다만, 하중을 제대로 받으려면 8mm 이상되는 제품을 사용하셔야 할것 같습니다. 제것은 너무 작더군요.
사진에서 자세히 보시면 베어링이 2층으로 되어 있는데 이것은 사실 2개가 아니라 1개입니다. 원래 윗판,아랫판,베어링판 이렇게 3층구조인데, "서보모터"와 "서보혼"의 간격 때문에 밑판 1개 제거했습니다.
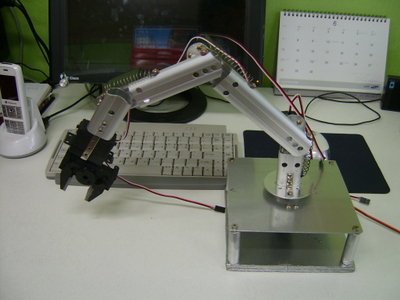
16. 로봇암 프레임 완성입니다. 사진에 있는 미니 키보드와 15" LCD모니터와 크기 비교해 보십시요. 대강의 크기가 짐작 가실겁니다. 서보모터는 관절마다 1개식 장착되었고요. 사진상 반대쪽이라서 보이질 않습니다만, 전체 6개 사용되었습니다.
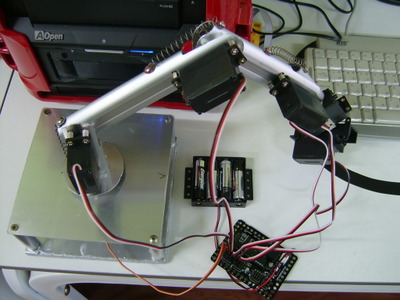
17. 컨트롤러와 건전지 홀더 설치한 사진. 테스트 정도만 하기로 하고, "MCU보드"와 "건전지홀더"를 고정하지는 않았습니다. 완성되어가니 점점 귀찮아지고 지루해져서요... PC와 연결해서 "로직"이라는 SW로 작동시켜 봤습니다.
작동은 되지만, 제대로 작동되지는 않더군요. 약간식만 작동되었습니다
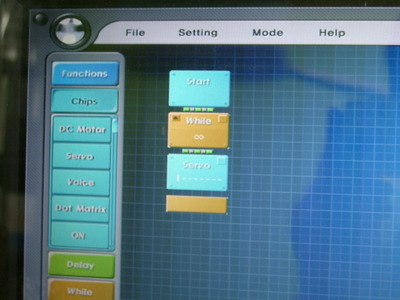
18. "로보로보사"의 "로직SW" 화면입니다. 보시다시피 아이콘으로 되어 있습니다. 기초적인 프로그램은 이해하고 있어야 사용하겠죠. 그러나, 기초지식만 있으시면 30분내로 배우실 수 있습니다.
마치 "로보로보" 홍보하는것 같네요. 그러나, "로보로보"와 별 관계는 없습니다. 그저 제가 사용했을 뿐이고... 타사 보드들도 사용 가능하겠지만, 다른것은 시도해보지 않았을 뿐입니다.
19. 성능
(1)컨트롤러 작동상태 : 아주 잘 작동합니다. 원래 로봇용이라서 서보모터와 연동이 잘됩니다.
(2)로봇암 회전 상태 : 작동은 합니다만, 성능이 많이 부족합니다. 실제 설정 각도보다 많이 부족합니다.
(3)"로직SW"적용 : "로직SW"는 잘 작동됩니다. SW상 문제는 전혀 없습니다.
20. 문제점
(1) 첫째로 사용하던 건전지를 사용한 관계로 전원이 많이 부족하더군요. 서보모터가 6개나 되는지라, 건전지AA형 4개(6V)로는 힘이 많이 딸립니다. 전원아답터라도 사용해야 할것 같습니다. 휴머노이드에 왜 그리 무식한 아답터를 사용하는지 알것 같더군요. 휴머노이드는 보통 32개이상의 서보모터를 사용하니까요.
(2)영점문제 : 서보모터의 영점을 미리 맞추어야 했는데, 이 영점을 무시하고 작동시켰더니, 의도대로 작동되지 못하더군요. 이건, 전원문제와는 완전 별개 문제였습니다.
(3) 하중문제 : 제가 초보티 나는 부분입니다. 서보모터가 강력한 모터가 아니다 보니, 서보모터 자체의 무게만으로도 무게가 많이 나갑니다. 서보모터 입장에서 자기 체중도 무시못할 무게입니다. 여기에 가볍다고는 하지만 알루미늄 재질의 로봇팔과, 플라스틱 그립도 무시못하겠더군요.
(4)서보모터 토크 : 서보모터 토크가 좀더 큰것으로 사용하면 좋을것 같습니다만, 토크가 큰 서보모터는 매우 비쌉니다. 로봇암 1개 제작하려고 비싼 모터를 여러개 구매하는것은 좀 돈 낭비일것 같네요.
20. 마무리
사실 로봇암을 처음 제작하는 단계이고, 로봇제작 경험도 많이 부족한 상태라서, 졸작이 나오는것이 너무나 당연한것 같습니다. 처음부터 잘될것이라고 생각지는 않았습니다.
초보 여러분들께 조금이나마 도움이 되고자, 생각했고요. 그래서 부품 구매처와 가격도 대강 올렸습니다. 한날에 구매한것이 아니라서 정확한 가격은 올리지 못했지만 그래도 생각나는대로 적어보았습니다. 참고하시라고요...
로봇암 제작 그 자체를 목적으로 하다보니, 약간 복잡하고 시간 걸리는 부분은 그냥 건너 뛰고 만들다보니, 거의 기계제작 수준이되었습니다. 그래서 부품 1개 구매하고 조립하고 수정하고, 또 필요하면 부품구매하고 조립하고 수정하고를 여러차례 반복했습니다. 이러다 보니 설계부터 완성까지 거의 한달정도가 소요되었습니다. 심지어 필요한 공구까지 구매하면서 제작해서 전체 비용은 상당히 많이 들었던것 같습니다.
원래 성공적으로 완성, 작동되어야 이런 "포스트"도 올리는 것이겠지만, 저는 그냥 올렸습니다. 중간 과정도 필요할것 같고, 실패 경험도 필요하니까요. 이 로봇암도 나중에 개선하고 잘작동되면 그때 다시 개선사항을 올리기로 하고요, 그나마, 귀찮아지면 여기서 중단되기도 할것 같습니다.
요즈음은 실패가 두려운것 보다 귀찮니즘이 더 무서울때가 많습니다. 시작해놓고 귀찮아져서 중단하는 사례가 종종 있었습니다. 거기에다가 마눌의 눈치(돈도 안되는것을 왜~~)까지 보면서 몰래 완성했습니다.
여기까지 지루한 글 읽어주셔서 감사하고요. 로봇암을 제작하시는 초보 여러분에게 조금이나마 도움이되셨으면 좋겠습니다.
댓글목록 0
등록된 댓글이 없습니다.