유선조종 5축 로봇팔 제작
페이지 정보
작성자 별명이라(todaksen) 작성일 09-09-01 00:14 조회 16,030 댓글 0본문

이번에 새롭게 런칭한 5축 로봇암입니다.(한ㄱ구
견고함과 동작성 모두 만족할 만 합니다^^
일단 박스의 모습입니다.
일본어매뉴얼이외에 한글 번역본 매뉴얼이 추가되어 있습니다.
조립 시 니퍼, 드라이버가 필요하며 여유부품이 일절없으니(볼트 등의 부품도...) 잃어버리지 않게 유의하여야 합니다^^.
일단, 박스 모습입니다~~.

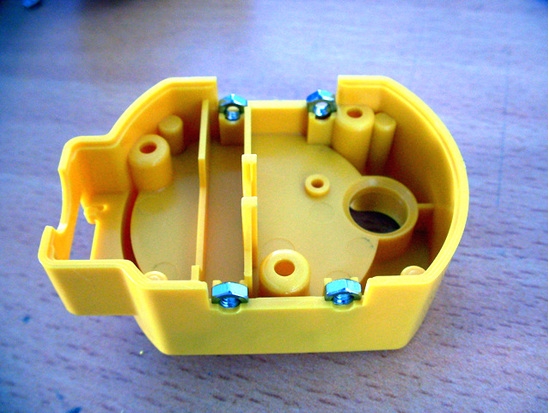
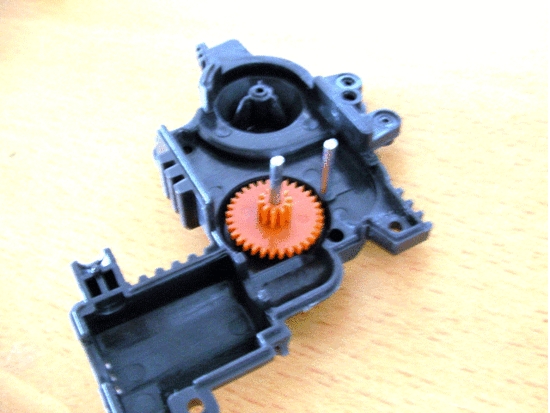
1. 기어박스의 조립
기어박스의 조립은 모두 비슷합니다. 기어박스에 너트를 끼울 때 사진처럼 윗부분이 모서리가 오도록 끼워야 정확하게 조립이 됩니다.
기어박스에 기어를 끼우는 순서입니다.
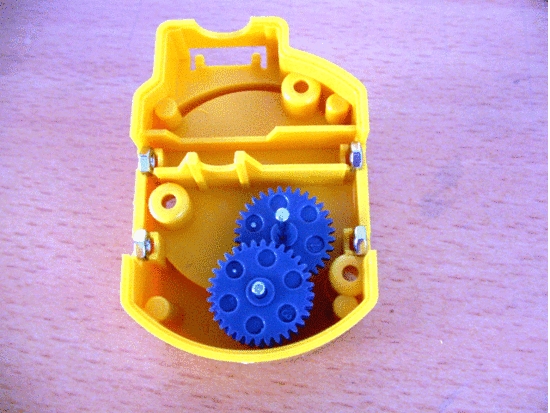
긴 탭핑스쿠류로 조립을 하고 모터선을 사진과 같이 정리 하면 완료!!
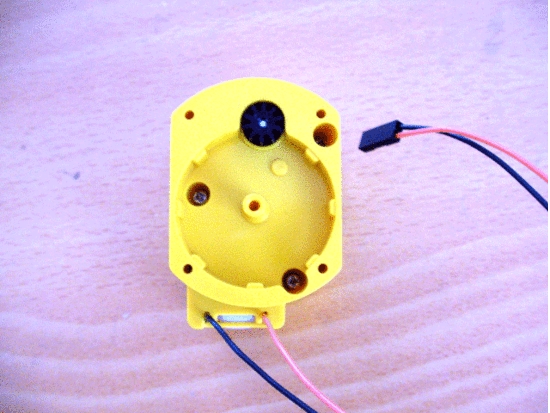
이렇게 총 3종류 4개의 기어박스를 제작합니다.
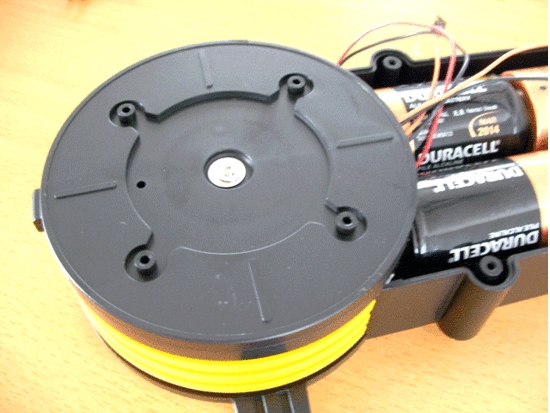
2. 몸체 만들기
몸체 제작시 큰 주의사항은 없습니다.
M5 기어박스를 끼워야 하며 (선 길이 때문에 그렇습니다~~) 전지판을 끼울때는 극성 주의!!!. 하시고. 배선정리를 합니다.
건전지는 사진처럼 되도록이면 알카라인을 쓰시는게 오히려 더 경제적입니다.
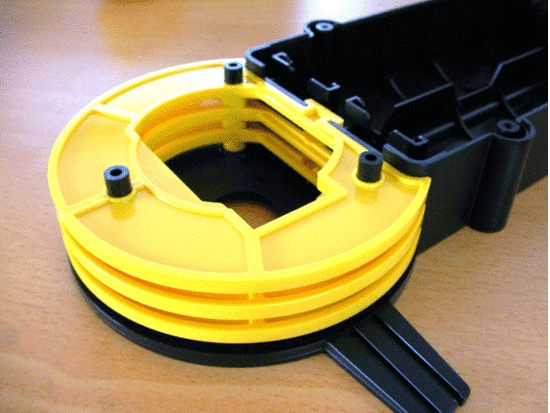
몸체 회전부 조립 사진입니다.
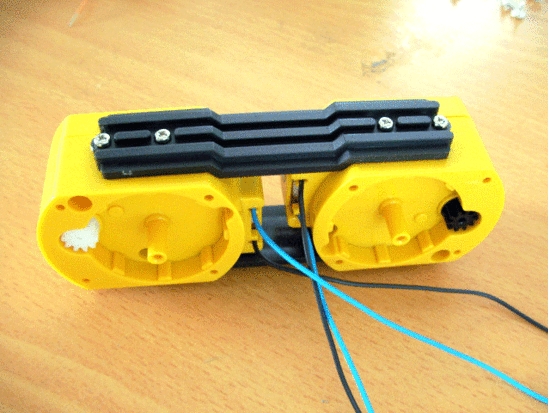
3. 팔 만들기
M2, M3 기어박스를 연결하여 팔을 만듭니다. 이때 기어박스 위치와 손목연결부의 방향에 주의하여 조립합니다.
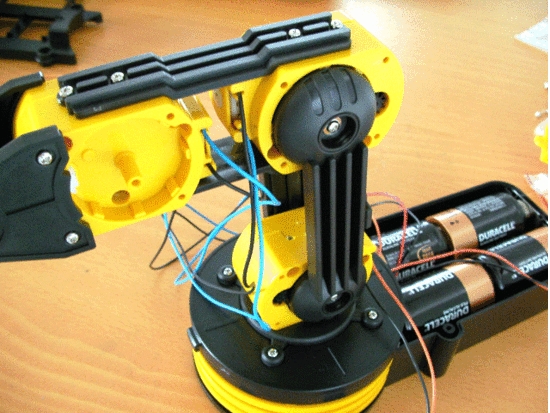
4. 팔과 몸체의 조립
기어가 연결되는 부분과 전선 정리를 위한 홈의 방향에 주의하여 조립합니다.
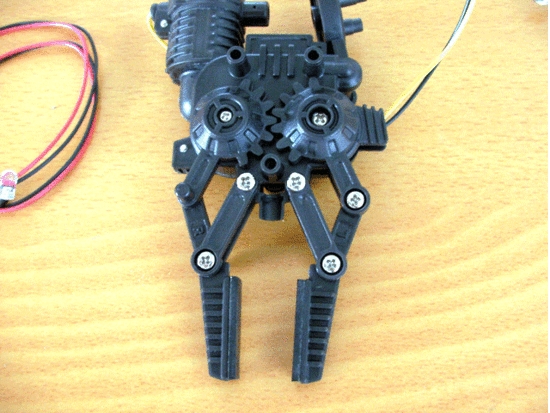
5. gripper 조립
기어부 조립 (오른쪽이 작은 쇠막대입니다^^)
그립은 좌우 간격만 주의하면 크게 문제될 것이 없습니다.
손과 손목의 연결방법은 아이디어가 꽤 좋은 것 같습니다^^
5. 손목 구동 링크 만들기

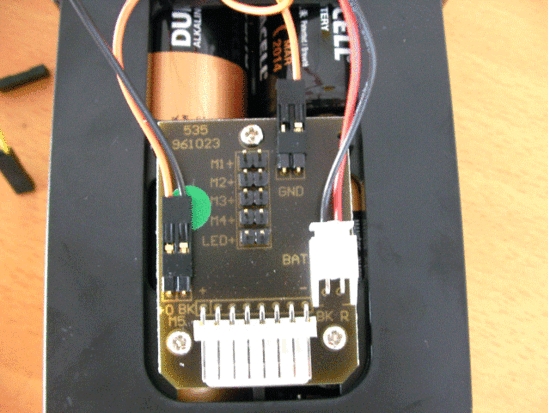
6. 선 정리 및 연결
선을 이쁘게 정리합니다. 메인보드에 연결 시 오렌지색 하나만 있는 것은 그라운드로 오른쪽 왼쪽 아무 방향이나 끼워도 됩니다. (PCB를 뒤집어 보면 연결되 있습니다^^)
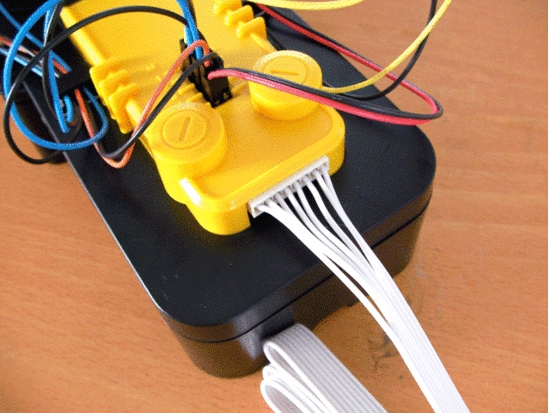
7. 리모콘 만들기
쉽게 제작 후^^ 메인보드에 연결!!
적당히 동작해 본 후 선 중간 적당한 곳에 케이블타이(제품에 들어있지 않습니다.)로 추가 정리하면 좋습니다.
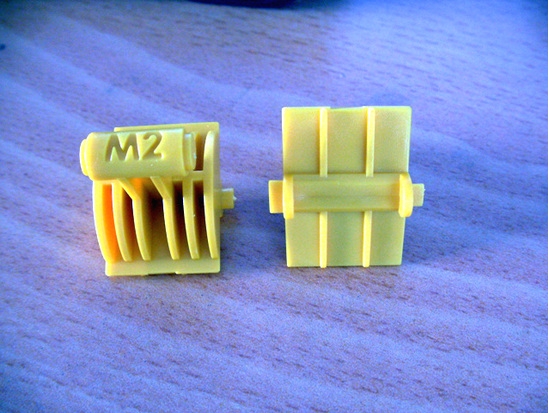
8. 기타.
리모콘을 만들던 중 조종레버에 이름이 써 있는데 이를 뒤집어 끼우다보면 글자가 꺼꾸로 끼우게 될 수 도 있지 않을까 하는 생각이 들었는데...
홈에 레버를 끼우는 곳의 두께가 달라 꺼꾸로 끼워지지 않게됨을 알았습니다. 사용자를 위한 세심한 배려... 많은 제조사에도 이런 배려가 있기를^^
9. 완성사진 및 동영상~~

이 제품은 USB interface Kit를 이용하여 PC로 제어가 가능한데 다음에 소개하도록 하겠습니다^^
댓글목록 0
등록된 댓글이 없습니다.