SOCCER ROBOT
페이지 정보
작성자 라퓨타 로봇왕국 댓글 0건 조회 12,569회 작성일 09-10-02 22:08본문
111111111111111111111111111111

| SOCCER ROBOT | |||||||
| MR-9152 | | ||||||
| 14세 이상 | |||||||
|
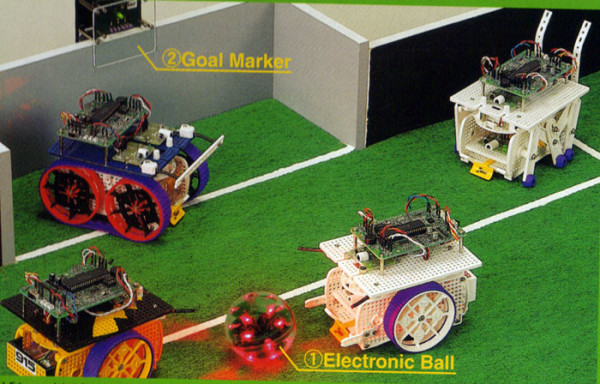
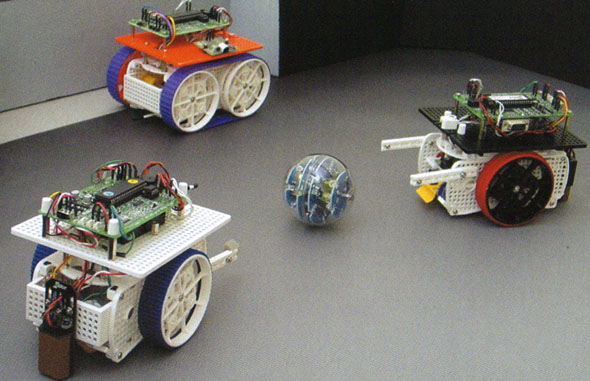
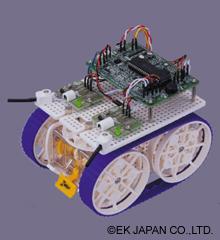
자율형 로봇 키트입니다.로봇 축구에 관심 많은 학생들을 위해 제작된 로봇입니다.
제조사:
ELEKIT
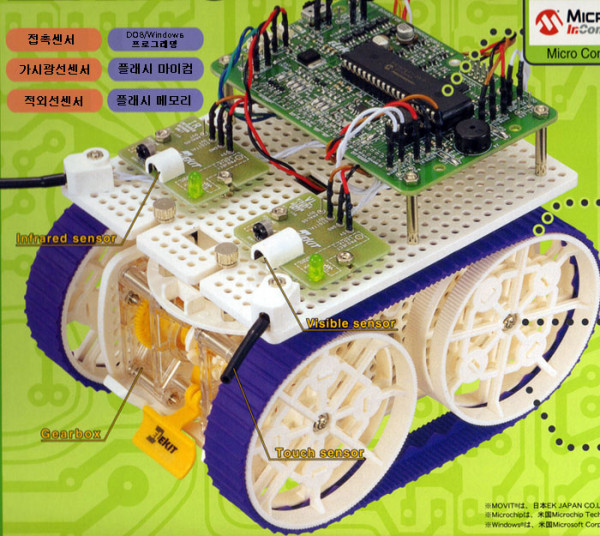
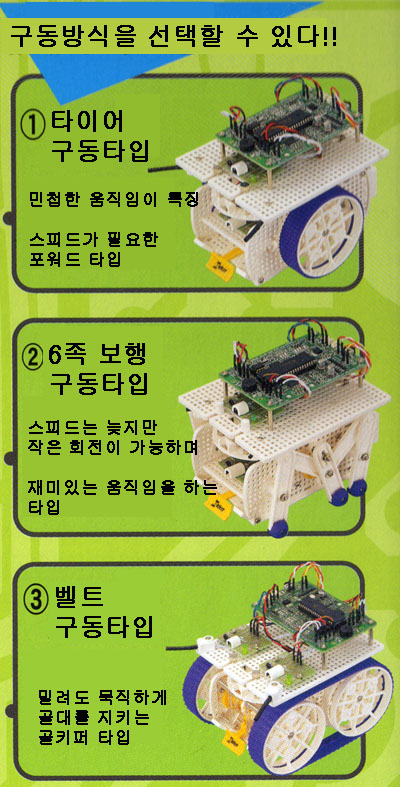
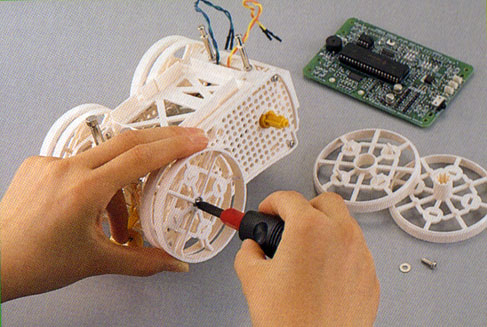
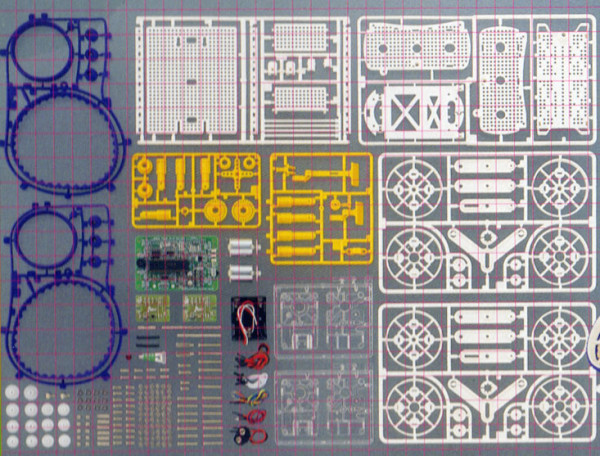
로봇의 제작을 통하여 로봇의 동력원인 모터,기어 박스의 구조나 센서나 컨트롤러의 구조에 대해 배울 수 있고, 마이크로 프로세서를 이용한 로봇의 컨트롤은 프로그래밍을 이용하며 축구 로봇의 움직임 이나 팀 전략 등에 대해 폭넓게 학습할 수 있습니다.3단 변속의 기어 박스와 ,타이어,6개 다리,벨트의 구동 방식 등을 선택하여 조립할 수 있으며 각종 센서(가시 광센서·적외선 센서·접촉 센서)를 사용하고,인식한 환경에 대응하고 그때 그때의 움직임을 마이크로 컴퓨터로 제어한 자율형 로봇 키트입니다.본체에 열려 있는 구멍을 이용하여 여러 부분에 센서를 설치 할 수 있습니다.설치 위치나 각도를 바꾸는 것으로 로봇의 성격이 변합니다.포함된 소프트웨어「타일 디자이너」로 작성한 프로그램을 로봇에 입력시키고,자신만의 움직임으로 경기를 할 수 있습니다.로봇이라는 새로운 교육 미디어를 통하여 사람과 사람과의 관계나 커뮤니케이션의 방법에 관하여 생각할 수 있게 해주는 새로운 로봇 키트입니다. ■로봇 본체■
●부속 센서:가시 광센서×1,적외선 센서×1,접촉 센서×2 ●사용 건전지(별매):전자 회로부/9V×1개 ,모터 구동 회로/AA×3개 ●소비 전류 ·전자 회로부/대기시 약20mA,주행시 약35mA, 통신 시약35mA(투광 용LED 비사용시) ·모터 구동 회로부:평균 약500mA ●사이즈 타이어 구동 타입:W125×H145×D159mm 벨트 구동 타입:W125×H145×D169mm 6개 다리 구동 타입:W120×H145×D159mm ●중량 타이어 구동 타입:약 475g(전지 미포함 시) 벨트 구동 타입:약 525g(전지 미포함 시) 6개 다리 구동 타입:약 470g(전지 미포함 시)
ELEKIT
로봇의 제작을 통하여 로봇의 동력원인 모터,기어 박스의 구조나 센서나 컨트롤러의 구조에 대해 배울 수 있고, 마이크로 프로세서를 이용한 로봇의 컨트롤은 프로그래밍을 이용하며 축구 로봇의 움직임 이나 팀 전략 등에 대해 폭넓게 학습할 수 있습니다.3단 변속의 기어 박스와 ,타이어,6개 다리,벨트의 구동 방식 등을 선택하여 조립할 수 있으며 각종 센서(가시 광센서·적외선 센서·접촉 센서)를 사용하고,인식한 환경에 대응하고 그때 그때의 움직임을 마이크로 컴퓨터로 제어한 자율형 로봇 키트입니다.본체에 열려 있는 구멍을 이용하여 여러 부분에 센서를 설치 할 수 있습니다.설치 위치나 각도를 바꾸는 것으로 로봇의 성격이 변합니다.포함된 소프트웨어「타일 디자이너」로 작성한 프로그램을 로봇에 입력시키고,자신만의 움직임으로 경기를 할 수 있습니다.로봇이라는 새로운 교육 미디어를 통하여 사람과 사람과의 관계나 커뮤니케이션의 방법에 관하여 생각할 수 있게 해주는 새로운 로봇 키트입니다. ■로봇 본체■
●부속 센서:가시 광센서×1,적외선 센서×1,접촉 센서×2 ●사용 건전지(별매):전자 회로부/9V×1개 ,모터 구동 회로/AA×3개 ●소비 전류 ·전자 회로부/대기시 약20mA,주행시 약35mA, 통신 시약35mA(투광 용LED 비사용시) ·모터 구동 회로부:평균 약500mA ●사이즈 타이어 구동 타입:W125×H145×D159mm 벨트 구동 타입:W125×H145×D169mm 6개 다리 구동 타입:W120×H145×D159mm ●중량 타이어 구동 타입:약 475g(전지 미포함 시) 벨트 구동 타입:약 525g(전지 미포함 시) 6개 다리 구동 타입:약 470g(전지 미포함 시)
| |||||||


관련링크
- http://3144 400회 연결
댓글목록
등록된 댓글이 없습니다.